

CHAPTER 6
STANDARD AND PTS INTERRUPTS
This microcontroller’s flexible interrupt-handling system has three main components: the programmable interrupt controller, the peripheral transaction server (PTS), and the peripheral interrupt handlers (PIHs). This chapter describes these components and explains how to program them.
6.1OVERVIEW OF THE INTERRUPT CONTROL CIRCUITRY
The interrupt control circuitry within a microcontroller permits real-time events to control program flow. When an event generates an interrupt, the microcontroller suspends the execution of current instructions while it performs some service in response to the interrupt. When the interrupt is serviced, program execution resumes at the point where the interrupt occurred. An internal peripheral, an external signal, or an instruction can generate an interrupt request. In the simplest case, the microcontroller receives the request, performs the service, and returns to the task that was interrupted.
The interrupt sources fall into two categories. The unimplemented opcode, software trap, and NMI interrupt sources are always enabled. All other sources can be individually enabled.
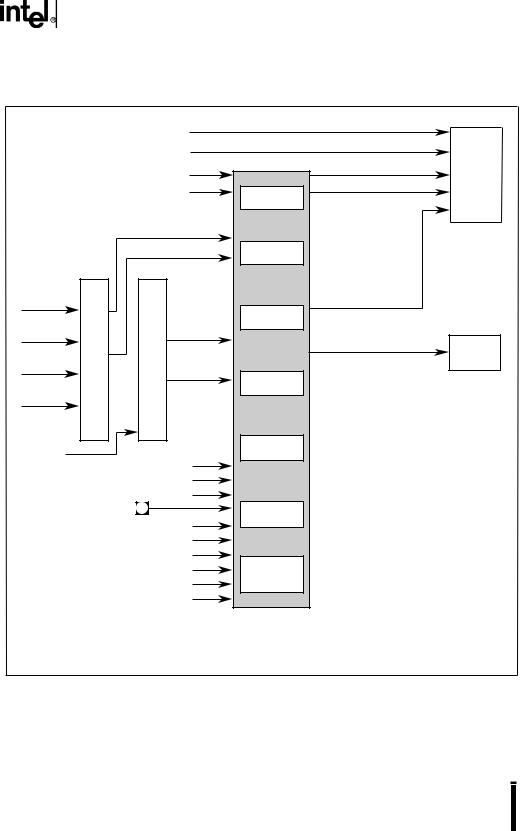
Interrupts that go through the interrupt controller are serviced by interrupt service routines that you provide (Figure 6-1). The lower 16 bits of the addresses of these interrupt service routines are stored in the upper and lower interrupt vectors in special-purpose memory (Table 4-2 on page 4-8). The CPU automatically adds FF0000H to the 16-bit vector in special-purpose memory to calculate the address of the interrupt service routine, and then executes the routine.
The peripheral transaction server (PTS), a microcoded hardware interrupt processor, provides high-speed, low-overhead interrupt handling; it does not modify the stack or the PSW. You can configure most interrupts (except NMI, software trap (TRAP), unimplemented opcode, stack overflow, PIH0_INT, and PIH1_INT) to be serviced by the PTS instead of the interrupt controller.
The PTS provides four special microcoded routines that enable it to complete specific tasks faster than an equivalent interrupt service routine. It can transfer bytes or words, either individually or in blocks, between any memory locations in page 00H; abort PTS service if a dummy PTS request occurs; and test for a missing event in a series of regular events. PTS interrupts have a higher priority than standard interrupts and may temporarily suspend interrupt service routines.
A block of data called the PTS control block (PTSCB) contains the specific details for each PTS routine (see “Initializing the PTS Control Blocks” on page 6-30). When a PTS interrupt occurs, the priority resolver selects the appropriate vector from special-purpose memory and fetches the PTS control block (PTSCB).
To provide support for the large number of event processor array (EPA) channels, the 8XC196EA incorporates two peripheral interrupt handlers (PIHs). Each PIH services 16 different interrupt sources. You can select either interrupt controller or PTS service for each PIH interrupt source. When a PIH receives an interrupt request from an enabled source, it generates either a standard
6-1
8XC196EA USER’S MANUAL
interrupt request or PTS service request to the CPU. Although the PIH interrupt vectors are stored in special-purpose memory, the PIH must supply the interrupt vector address to the CPU.
|
Unimplemented Opcode |
|
|
|||
|
|
|
|
TRAP |
|
Interrupt |
|
|
|
|
|
|
|
|
|
|
|
NMI † |
NMI |
Controller |
|
|
|
|
|
|
|
|
|
Stack Overflow † |
Stack Overflow |
|
||
|
|
INT_PEND |
|
|||
|
|
|
|
|
|
|
|
|
|
|
PIH1_INT |
|
|
|
|
|
|
PIH1_PTS |
INT_PEND1 |
|
|
|
|
|
|
Highest Priority Standard |
|
EPA16 |
1 |
|
0 |
|
Interrupt Request |
|
Handler |
|
Handler |
PIH0_INT |
|
|
|
OS7:0 |
|
INT_MASK |
|
|||
|
|
|
|
|
|
|
|
Interrupt |
(PIH1) |
Interrupt |
(PIH0) PIH0_PTS |
Highest Priority PTS Request |
PTS |
|
|
|||||
|
|
|
|
|
|
|
OVRTM4:1 |
Peripheral |
|
Peripheral |
|
|
|
|
|
|
INT_MASK1 |
|
||
|
|
|
|
|
|
|
OVR2:0 |
|
|
|
|
|
|
EPA15:0 |
|
|
|
|
PTSSEL |
|
|
|
|
|
|
|
|
|
|
|
|
SSIO1 |
|
|
|
|
|
|
SSIO0 |
|
|
|
|
|
|
SDU |
|
|
|
|
EXTINT |
|
|
PTSSRV |
|
|
|
|
|
|
|
|
|
|
|
|
RI1 |
|
|
|
|
|
|
TI1 |
|
|
|
|
|
AD_DONE |
|
|
|
|
|
|
EPAx_OVR |
Priority |
|
|
|
|
|
|
RI0 |
Resolver |
|
|
|
|
|
|
|
|
|
|
|
|
TI0 |
|
|
† The NMI and Stack Overflow interrupts cannot be masked and are always serviced by the |
||||||
interrupt controller. |
|
|
|
|
||
|
|
|
|
|
|
A4305-01 |
Figure 6-1. Interrupt Structure Block Diagram
6-2
STANDARD AND PTS INTERRUPTS
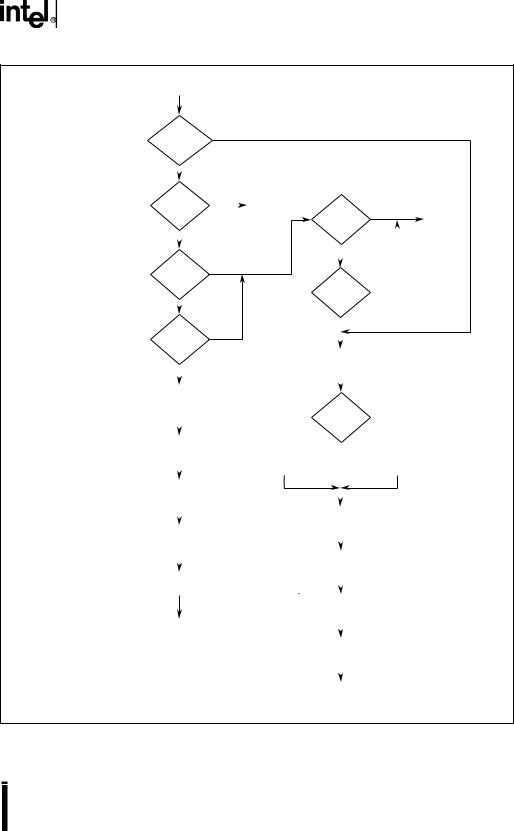
Interrupt Pending or PTSSRV Bit Set
|
NMI or |
Yes |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Stack Overflow |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pending |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
No |
No |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
INT_MASK.x |
Return |
|
|
|
|
|
No |
|||||||||
= 1? |
|
|
|
|
|
|
Interrupts |
||||||||||
|
|
|
|
|
|
|
|
|
|
Enabled |
|
|
Return |
||||
|
|
Yes |
|
|
|
|
|
|
? |
|
|
|
|
|
|
||
|
PTS |
No |
|
|
|
|
|
|
Yes |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Enabled |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
? |
|
|
|
|
|
PTSSEL.x |
|
No |
|
||||||||
|
|
Yes |
|
|
|
|
|
|
|
Bit = 0 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
? |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
PTSSEL.x |
No |
|
|
|
|
|
|
Yes |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Bit = 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
? |
|
|
|
|
|
|
|
Priority |
|
|
|
|
|||||
|
|
Yes |
|
|
|
|
|
|
Resolver |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Highest Priority Interrupt |
||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Priority |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Resolver |
|
|
|
Yes |
|
|
|
|
|
|
No |
|||||
Highest Priority PTS Interrupt |
|
|
|
|
PTSSRV.x |
||||||||||||
|
|
|
|
|
|
|
= 1 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
? |
|
|
|
|
|
|
||
|
Reset INT_PEND.x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Bit |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Reset PTSSRV.x |
|
|
|
Reset INT_PEND.x |
|
|||||||
|
|
|
|
|
Bit |
|
|
|
|
|
|
Bit |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Execute PTS Cycles |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
(Microcoded) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PUSH PC |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
on Stack |
|
|
|
|
||||
|
Clear PTSSEL.x Bit |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
LJMP to Interrupt |
|
|
|
|||||||
|
|
|
|
|
|
|
Service Routine |
|
|
|
|||||||
|
Set PTSSRV.x Bit |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Execute Interrupt |
|
|||||||||
|
|
|
|
|
|
|
Service Routine |
|
|||||||||
Request end-of-PTS interrupt |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
POP PC |
|
|
|
|
||||
|
|
|
|
|
|
|
|
from Stack |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Return |
|
|
|
|
|||
A4304-03
Figure 6-2. Interrupt Service Flow Diagram
6-3

8XC196EA USER’S MANUAL
6.2INTERRUPT SIGNALS AND REGISTERS
Table 6-1 describes the external interrupt signals and Table 6-2 describes the interrupt control and status registers.
|
|
Table 6-1. Interrupt Signals |
|
Interrupt |
Type |
Description |
|
Signal |
|||
|
|
||
|
|
|
|
EXTINT |
I |
External Interrupt |
|
|
|
In normal operating mode, a rising edge on EXTINT sets the EXTINT interrupt pending |
|
|
|
bit. EXTINT is sampled during phase 2 (CLKOUT high). The minimum high time is one |
|
|
|
state time. |
|
|
|
In powerdown mode, asserting the EXTINT signal for at least 50 ns causes the device |
|
|
|
to resume normal operation. The interrupt does not need to be enabled, but the pin |
|
|
|
must be configured as a special-function input. If the EXTINT interrupt is enabled, the |
|
|
|
CPU executes the interrupt service routine. Otherwise, the CPU executes the |
|
|
|
instruction that immediately follows the command that invoked the power-saving mode. |
|
|
|
In idle mode, asserting any enabled interrupt causes the device to resume normal |
|
|
|
operation. |
|
|
|
EXTINT shares a package pin with P2.2. |
|
|
|
|
|
NMI |
I |
Nonmaskable Interrupt |
|
|
|
In normal operating mode, a rising edge on NMI generates a nonmaskable interrupt. |
|
|
|
NMI has the highest priority of all prioritized interrupts. Assert NMI for greater than one |
|
|
|
state time to guarantee that it is recognized. |
|
|
|
|
Table 6-2. Interrupt and PTS Control and Status Registers
Mnemonic |
Address |
Description |
|
|
|
INT_MASK |
0008H |
Interrupt Mask Registers |
INT_MASK1 |
0013H |
The bits in these registers enable or disable each maskable |
|
|
|
|
|
interrupt (that is, each interrupt except unimplemented opcode, |
|
|
software trap, NMI, and stack overflow). |
|
|
|
INT_PEND |
0009H |
Interrupt Pending Registers |
INT_PEND1 |
0012H |
The bits in these registers are set by hardware to indicate that an |
|
|
|
|
|
interrupt is pending. |
|
|
|
PIH0_INT_MASK |
1E98H |
Peripheral Interrupt Handler (PIH) Interrupt Mask Registers |
PIH1_INT_MASK |
1EA8H |
The bits in these registers enable or disable each interrupt that is |
|
|
|
|
|
routed through the PIH. |
|
|
|
PIH0_INT_PEND |
1E9AH |
Peripheral Interrupt Handler (PIH) Interrupt Pending Registers |
PIH1_INT_PEND |
1EAAH |
The bits in these registers are set by hardware to indicate that a |
|
|
|
|
|
PIH interrupt source is pending. |
|
|
|
PIH0_PTSSEL |
1E96H |
Peripheral Interrupt Handler (PIH) PTS Select Registers |
PIH1_PTSSEL |
1EA6H |
These registers select either a PTS interrupt service request or a |
|
|
|
|
|
standard interrupt service request for each interrupt that is routed |
|
|
through the PIH. |
|
|
|
6-4