

8XC196EA USER’S MANUAL
PIH1_PTSSRV |
Address: |
1EA4H |
|
Reset State: |
0000H |
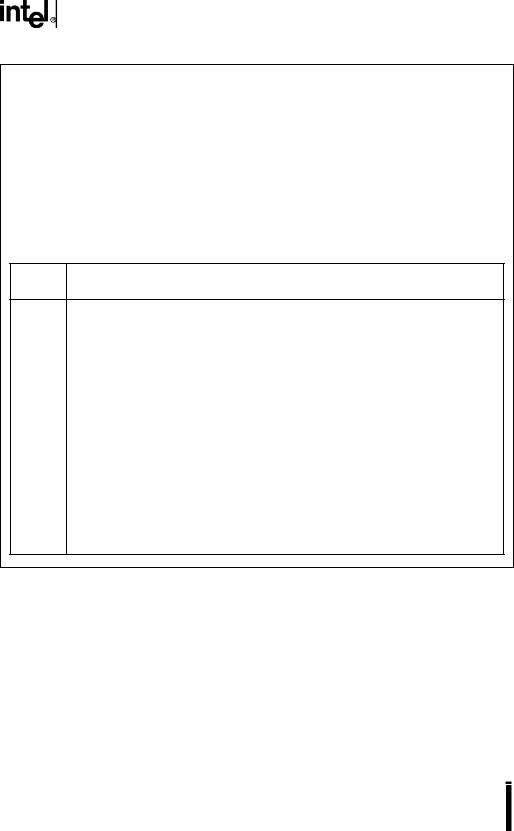
The PTS service (PIH1_PTSSRV) register for peripheral interrupt handler 1 is used by the hardware to indicate that the final PTS interrupt has been serviced by the PTS routine. When PTSCOUNT reaches zero, hardware clears the corresponding PIH1_PTSSEL bit and sets the PIH1_PTSSRV bit, which requests the end-of-PTS interrupt. When the end-of-PTS interrupt is called, hardware clears the PIH1_PTSSRV bit. The end-of-PTS interrupt service routine must set the PIH1_PTSSEL bit to reenable the PTS channel.
15
EPA16 |
OS7 |
OS6 |
OS5 |
7 |
|
|
|
|
|
|
|
OS0 |
OVRTM1 |
OVRTM2 |
OVRTM3 |
|
|
|
|
8
OS4 |
OS3 |
OS2 |
OS1 |
|
|
|
0 |
|
|
|
|
OVRTM4 |
OVR0 |
OVR1 |
OVR2 |
|
|
|
|
Bit
Function
Number
15:0 A bit is set by hardware to request an end-of-PTS interrupt for the corresponding interrupt through its standard interrupt vector.
The standard interrupt vector locations are as follows:
Bit Mnemonic |
Interrupt |
Standard Vector |
EPA16 |
EPA Capture/Compare Channel 16 |
FF213CH |
OS7 |
Output Simulcapture Channel 7 |
FF2138H |
OS6 |
Output Simulcapture Channel 6 |
FF2134H |
OS5 |
Output Simulcapture Channel 5 |
FF2130H |
OS4 |
Output Simulcapture Channel 4 |
FF212CH |
OS3 |
Output Simulcapture Channel 3 |
FF2128H |
OS2 |
Output Simulcapture Channel 2 |
FF2124H |
OS1 |
Output Simulcapture Channel 1 |
FF2120H |
OS0 |
Output Simulcapture Channel 0 |
FF211CH |
OVRTM1 |
Timer 1 Overflow/Underflow |
FF2118H |
OVRTM2 |
Timer 2 Overflow/Underflow |
FF2114H |
OVRTM3 |
Timer 3 Overflow/Underflow |
FF2110H |
OVRTM4 |
Timer 4 Overflow/Underflow |
FF210CH |
OVR0 |
EPA Channel 0 Capture Overrun |
FF2108H |
OVR1 |
EPA Channel 1 Capture Overrun |
FF2104H |
OVR2 |
EPA Channel 2 Capture Overrun |
FF2100H |
Figure 6-22. PIH1 PTS Service (PIH1_PTSSRV) Register
6.6.2Selecting the PTS Mode
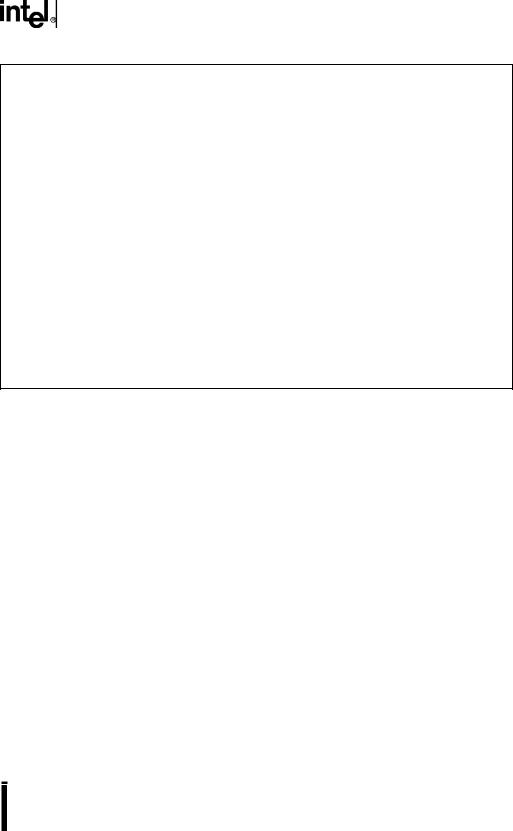
The second byte of each PTSCB is always an 8-bit value called PTSCON. Bits 5–7 select the PTS mode (Figure 6-23). The function of bits 0–4 differ for each PTS mode. Refer to the sections that describe each mode in detail to see the function of these bits. Table 6-6 on page 6-18 lists the cycle execution times for each PTS mode.
6-34
STANDARD AND PTS INTERRUPTS
PTSCON |
|
|
|
|
|
|
|
|
|
|
Address: PTSCB + 1 |
||
The PTS control (PTSCON) register selects the PTS mode and sets up control functions for that |
|||||||||||||
mode. |
|
|
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M2 |
M1 |
|
M0 |
|
|
† |
|
|
† |
† |
|
† |
† |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Bit |
Bit |
|
|
|
|
|
|
Function |
|
|
|
||
Number |
Mnemonic |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
7:5 |
M2:0 |
PTS Mode |
|
|
|
|
|
|
|
|
|||
|
|
|
These bits select the PTS mode: |
|
|
|
|
||||||
|
|
|
M2 |
M1 |
M0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
0 |
dummy mode |
|
|
|
|
||
|
|
|
0 |
0 |
|
1 |
block transfer |
|
|
|
|
||
|
|
|
0 |
1 |
|
0 |
reserved |
|
|
|
|
||
|
|
|
0 |
1 |
|
1 |
reserved |
|
|
|
|
||
|
|
|
1 |
0 |
|
0 |
reserved |
|
|
|
|
||
|
|
|
1 |
0 |
|
1 |
single transfer |
|
|
|
|
||
|
|
|
1 |
1 |
|
0 |
missed-event |
|
|
|
|
||
|
|
|
1 |
1 |
|
1 |
reserved |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
† The function of this bit depends upon which mode is selected. See the PTS control block description in each PTS mode section.
Figure 6-23. PTS Mode Selection Bits (PTSCON Bits 7:5)
6.6.3Single Transfer Mode
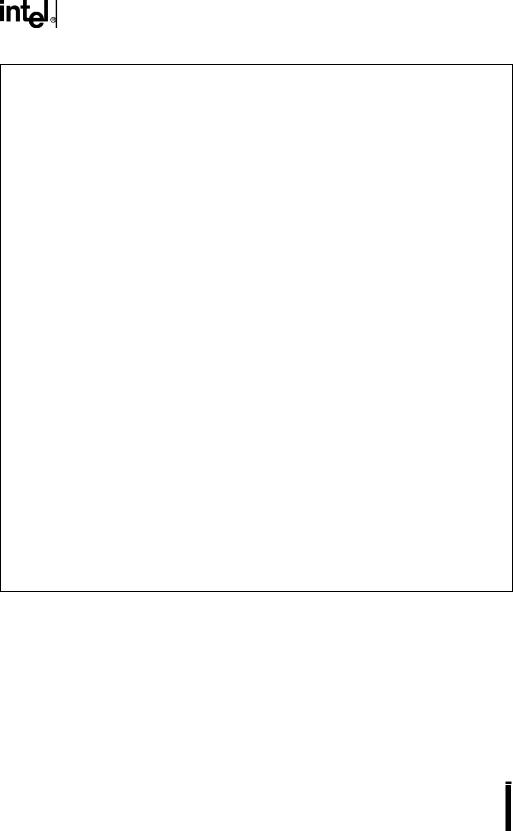
In single transfer mode, an interrupt causes the PTS to transfer a single byte or word (selected by the BW bit in PTSCON) from one memory location to another. This mode is typically used with serial I/O or synchronous serial I/O interrupts. It can also be used with the EPA to move captured time values from the event-time register to internal RAM for further processing. See AP-445, 8XC196KR Peripherals: A User’s Point of View , for application examples with code. Figure 6-24 shows the PTS control block for single transfer mode.
6-35
8XC196EA USER’S MANUAL
PTS Single Transfer Mode Control Block
In single transfer mode, the PTS control block contains both a source and a destination address (PTSSRC and PTSDST), a control register (PTSCON), and a transfer count (PTSCOUNT).
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
Unused |
|
0 |
0 |
0 |
|
0 |
|
0 |
0 |
|
0 |
0 |
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
Unused |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|
0 |
|
0 |
0 |
|
0 |
0 |
|
|
15 |
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSDST (H) |
|
|
|
PTS Destination Address (high byte) |
|
|
||||||
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSDST (L) |
|
|
|
PTS Destination Address (low byte) |
|
|
||||||
|
|
15 |
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSSRC (H) |
|
|
|
|
PTS Source Address (high byte) |
|
|
|||||
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
PTSSRC (L) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PTS Source Address (low byte) |
|
|
||||||
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSCON |
|
M2 |
M1 |
M0 |
|
BW |
|
SU |
DU |
|
SI |
DI |
|
|
7 |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
PTSCOUNT |
|
|
|
Consecutive Byte or Word Transfers |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Register |
Location |
|
|
|
|
|
Function |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
PTSDST |
PTSCB + 4 |
PTS Destination Address |
|
|
|
|
|
|
||||
|
|
|
Write the destination memory location to this register. A valid address is |
|||||||||
|
|
|
any unreserved memory location within page 00H; however, it must |
|||||||||
|
|
|
point to an even address if word transfers are selected. |
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||
PTSSRC |
PTSCB + 2 |
PTS Source Address |
|
|
|
|
|
|
||||
|
|
|
Write the source memory location to this register. A valid address is any |
|||||||||
|
|
|
unreserved memory location within page 00H; however, it must point to |
|||||||||
|
|
|
an even address if word transfers are selected. |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Figure 6-24. PTS Control Block — Single Transfer Mode
6-36
|
|
|
|
|
|
|
|
STANDARD AND PTS INTERRUPTS |
|
|
|
|
|
||||||
|
PTS Single Transfer Mode Control Block (Continued) |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Register |
Location |
|
|
|
|
|
Function |
|
|
|
|
|
|
|
|
|||
|
PTSCON |
PTSCB + 1 |
PTS Control Bits |
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
M2:0 |
PTS Mode |
|
|
|
||
|
|
|
|
M2 |
M1 |
M0 |
|
|
|
|
|
|
|
1 |
|
0 |
1 |
single transfer mode |
|
|
|
|
|
|
|
|
|||
|
|
|
BW |
Byte/Word Transfer |
|
|
|||
|
|
|
|
0 |
= word transfer |
|
|
||
|
|
|
|
1 |
= byte transfer |
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
SU† |
Update PTSSRC |
|
|
|||
|
|
|
|
0 |
= |
reload original PTS source address after each byte or word |
|
||
|
|
|
|
|
|
transfer |
|
|
|
|
|
|
|
1 |
= |
retain current PTS source address after each byte or word |
|
||
|
|
|
|
|
|
transfer |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
DU† |
Update PTSDST |
|
|
|||
|
|
|
|
0 |
= |
reload original PTS destination address after each byte or |
|
||
|
|
|
|
|
|
word transfer |
|
|
|
|
|
|
|
1 |
= |
retain current PTS destination address after each byte or |
|
||
|
|
|
|
|
|
word transfer |
|
|
|
|
|
|
|
|
|
||||
|
|
|
SI† |
PTSSRC Autoincrement |
|
||||
|
|
|
|
0 |
= |
the contents of PTSSRC are not incremented after each |
|
||
|
|
|
|
|
|
byte or word transfer |
|
||
|
|
|
|
1 |
= |
the contents of PTSSRC are incremented after each byte |
|
||
|
|
|
|
|
|
or word transfer |
|
|
|
|
|
|
|
|
|
||||
|
|
|
DI† |
PTSDST Autoincrement |
|
||||
|
|
|
|
0 |
= |
the contents of PTSDST are not incremented after each |
|
||
|
|
|
|
|
|
byte or word transfer |
|
||
|
|
|
|
1 |
= |
the contents of PTSDST are incremented after each byte or |
|
||
|
|
|
|
|
|
word transfer |
|
|
|
|
|
|
|
|
|
||||
|
PTSCOUNT |
PTSCB + 0 |
Consecutive Word or Byte Transfers |
|
|||||
|
|
|
Defines the number of words or bytes that will be transferred during the |
|
|||||
|
|
|
single transfer routine. Each word or byte transfer is one PTS cycle. |
|
|||||
|
|
|
Maximum value is 255. |
|
|
||||
|
|
|
|
|
|
|
|
|
|
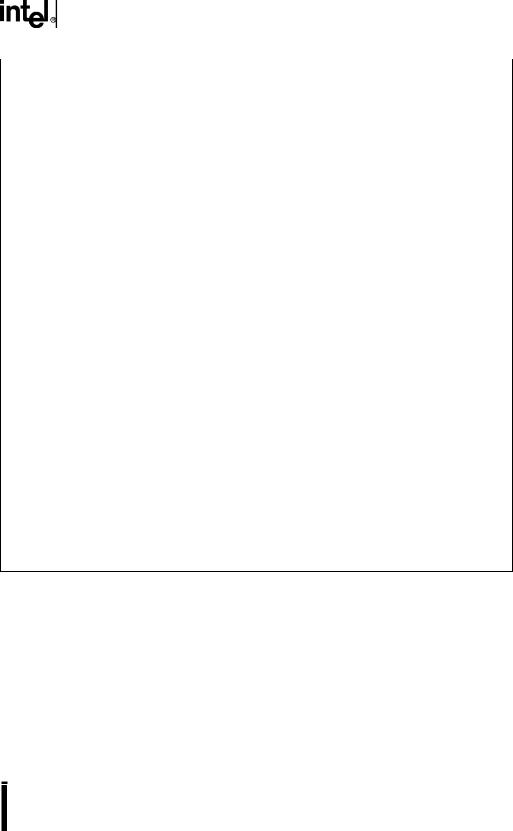
†The DU/DI bits and SU/SI bits are paired in single transfer mode. Each pair must be set or cleared together. However, the two pairs, DU/DI and SU/SI, do not need to be equal.
Figure 6-24. PTS Control Block — Single Transfer Mode (Continued)
The PTSCB in Table 6-8 defines nine PTS cycles. Each cycle moves a single word from location 20H to an external memory location. The PTS transfers the first word to location 6000H. Then it increments and updates the destination address and decrements the PTSCOUNT register; it does not increment the source address. When the second cycle begins, the PTS moves a second word from location 20H to location 6002H. When PTSCOUNT equals zero, the PTS will have filled locations 6000–600FH, and an end-of-PTS interrupt is generated.
6-37