

- •Предисловие
- •Глава 1. Основные понятия
- •1.1. Задачи и цель науки о сопротивлении материалов и ее значение для инженерного образования
- •1.2. Геометрическая классификация объектов
- •1.3. Классификация внешних сил
- •1.4. Расчетная схема
- •1.5. Допущения о свойствах материала
- •1.6. Внутренние усилия в поперечных сечениях бруса
- •1.6.1. Основные понятия
- •1.6.2. Метод сечений
- •1.6.3. Основные виды деформаций бруса
- •1.6.4. Определение внутренних усилий
- •1.6.5. Алгоритм построения эпюр
- •1.6.7. Интегральные зависимости между внутренними силовыми факторами и внешней нагрузкой
- •1.6.8. Примеры и правила построения эпюр
- •1.6.9. Методика построения эпюр в программном продукте MathCAD
- •1.7. Напряжения. Понятие о напряженном состоянии
- •1.8. Перемещения точки и линейного отрезка
- •1.9. Допущения о характере деформаций
- •Вопросы для самопроверки
- •Варианты вопросов в билетах ЕГЭ
- •Глава 2. Геометрические характеристики поперечных сечений брусьев
- •2.1. Моменты сечения
- •2.2. Центр тяжести сечения и свойство статического момента
- •2.3. Зависимости между моментами инерции относительно параллельных осей
- •2.4. Вычисление моментов инерции простых фигур
- •2.5. Изменение моментов инерции при повороте координатных осей
- •2.6. Главные оси и главные моменты инерции
- •2.7. Свойство моментов инерции относительно осей симметрии
- •2.8. Свойство моментов инерции правильных фигур относительно центральных осей
- •2.9. Вычисление моментов инерции сложных фигур
- •2.10. Примеры определения главных центральных осей и главных моментов инерции сечений
- •Вопросы для самопроверки
- •3.1. Основные понятия
- •3.2. Дифференциальные уравнения равновесия материальной частицы тела в случае плоской задачи
- •3.3. Исследование напряженного состояния в данной точке тела
- •3.4. Главные площадки и главные напряжения
- •3.5. Экстремальные касательные напряжения
- •3.6. Понятие об объёмном напряженном состоянии
- •3.6.1. Главные напряжения
- •3.6.2. Экстремальные касательные напряжения
- •3.6.3. Напряжения на произвольно наклонённых площадках
- •Вопросы для самопроверки
- •Варианты вопросов в билетах ЕГЭ
- •4.1. Соотношения Коши
- •4.2. Относительная деформация в произвольном направлении
- •4.3. Аналогия между зависимостями для напряженного и деформированного состояний в точке
- •4.4. Объёмная деформация
- •Вопросы для самопроверки
- •Варианты вопросов в билетах ЕГЭ
- •5.1. Закон Гука при растяжении и сжатии
- •5.2. Коэффициент Пуассона
- •5.3. Закон Гука при плоском и объёмном напряженных состояниях
- •5.4. Закон Гука при сдвиге
- •5.5. Потенциальная энергия упругих деформаций
- •5.6. Теорема Кастильяно
- •Вопросы для самопроверки
- •Варианты вопросов в билетах ЕГЭ
- •Глава 6. Механические характеристики материалов
- •6.1. Общие сведения о механических испытаниях материалов
- •6.2. Машины для испытания материалов
- •6.3. Образцы для испытания материалов на растяжение
- •6.6. Влияние температуры и других факторов на механические характеристики материалов
- •6.7.1. Особенности почвенной среды
- •6.7.2. Модели механического поведения почв
- •6.7.3. Образцы и схемы испытаний образцов почв
- •6.8. Расчетные, предельные, допускаемые напряжения
- •Вопросы для самопроверки
- •Варианты вопросов в билетах ЕГЭ
- •Глава 7. Теории предельного состояния материала
- •7.1. Основные понятия
- •7.2. Теория наибольших нормальных напряжений (первая теория прочности)
- •7.3. Теория наибольших относительных удлинений (вторая теория прочности)
- •7.4. Теория наибольших касательных напряжений (третья теория прочности)
- •7.5. Энергетическая теория (четвёртая теория прочности)
- •7.6. Теория Мора (феноменологическая теория)
- •7.8. Теории предельного состояния почв
- •7.9. Концентрация напряжений и её влияние на прочность при постоянных во времени напряжениях
- •7.10. Механика хрупкого разрушения
- •Вопросы для самопроверки
- •Глава 8. Растяжение и сжатие
- •8.1. Напряженное состояние в точках бруса
- •8.1.1. Напряжения в поперечных сечениях
- •8.1.2. Напряжения в наклонных сечениях
- •8.2. Перемещения при растяжении (сжатии)
- •8.2.1. Перемещение точек оси бруса
- •8.2.2. Перемещения узлов стержневых систем
- •8.3. Расчеты на прочность
- •8.4. Потенциальная энергия при растяжении и сжатии
- •8.5. Статически неопределимые системы
- •8.5.1. Основные понятия
- •8.5.2. Определение напряжений в поперечных сечениях бруса, заделанного двумя концами
- •8.5.5. Расчет статически неопределимых плоских стержневых систем, подверженных действию температуры
- •8.5.6. Монтажные напряжения в статически неопределимых плоских стержневых системах
- •Вопросы для самопроверки
- •Варианты вопросов в билетах ЕГЭ
- •Глава 9. Сдвиг и кручение
- •9.1. Практический расчет соединений, работающих на сдвиг
- •9.1.1. Расчет заклёпочных, штифтовых и болтовых соединений
- •9.1.2. Расчет сварных соединений на срез
- •9.2. Кручение
- •9.2.1. Основные понятия. Крутящие моменты и построение их эпюр
- •9.2.2. Напряжения и деформации при кручении прямого бруса круглого поперечного сечения
- •9.2.3. Анализ напряжённого состояния при кручении бруса с круглым поперечным сечением. Главные напряжения и главные площадки
- •9.2.4. Потенциальная энергия при кручении бруса с круглым поперечным сечением
- •9.2.5. Расчет бруса круглого поперечного сечения на прочность и жесткость при кручении
- •9.2.6. Расчет цилиндрических винтовых пружин малого шага
- •9.2.7. Кручение тонкостенного бруса замкнутого профиля
- •9.2.8. Кручение прямого бруса некруглого поперечного сечения
- •9.2.9. Кручение тонкостенного бруса открытого профиля
- •Вопросы для самопроверки
- •Варианты вопросов в билетах ЕГЭ
- •10.1. Общие понятия
- •10.2. Прямой чистый изгиб. Определение нормальных напряжений
- •10.3. Касательные напряжения при поперечном изгибе
- •10.4. Напряжения при изгибе тонкостенных брусьев
- •10.5. Понятие о центре изгиба
- •10.6. Анализ напряженного состояния при изгибе
- •10.7. Проверка прочности брусьев при изгибе
- •10.8. Рациональная форма поперечных сечений брусьев
- •10.10. Определение перемещений в балках постоянного сечения методом непосредственного интегрирования
- •10.11. Определение перемещений в балках постоянного сечения методом начальных параметров
- •Вопросы для самопроверки
- •Варианты вопросов в билетах ЕГЭ
- •Приложения
Приложения

Приложение А (основное)
Введение в метод конечных элементов53
Современные информационные технологии позволяют существенно повысить производительность труда в управлении производством, проектировании и исследовании объектов и процессов. В настоящее время ряд задач, считавшихся сугубо интеллектуальными и подлежащими компетенции только человека, перешли в разряд вычислительных, и ЭВМ во все большей степени вместо выполнения элементарных функций помощника-вычислителя начинает играть роль соавтора-конструктора. Теперь машине нужно задать уже не мелочно регламентированную последовательность предписанных вычислений, а только основные сведения об объекте исследования и постановку задачи. Даже выбор конкретного метода решения ЭВМ в принципе может сделать сама, опираясь, например, на сравнение объёмов вычислений по имеющимся в её распоряжении алгоритмам.
В последние десятилетия резко возросла сложность задач, которые ставит перед механикой техника. Как правило, эти задачи имеют объем, делающий невозможным их решение средствами традиционной «бумажно-ручной» технологии. Даже в тех случаях, когда соответствующие расчеты могут быть проведены вручную, они оказываются чрезвычайно громоздкими и занимают неоправданно много времени.
При неавтоматизированном проектировании результаты во многом определяются инженерной подготовкой кон-
53 Жилкин В. А. Расчеты на прочность и жесткость элементов сельскохозяйственных машин. Челябинск : ЧГАУ, 2005. 427 с.; Жилкин В. А. Элементы прикладной и строительной механики сельхозмашин. Применение программ MathCAD, SCAD, MSC/Patran-Nastran 2005. Челябинск : ЧГАУ, 2007. 349 с.; Никонов В. Н. Лекция третья. Введение в МКЭ. 2005–2008, ЦНЭАТ, г. Самара (www.cneat.ru); Жилкин В. А. Исследование плоского напряженного состояния пластин в программных продуктах SCAD, MSC.Patran- Nastran-2005 : метод. указ. Челябинск : ЧГАУ, 2007. 67 с.; Жилкин В. А. Определение геометрических характеристик поперечных сечений брусьев в программных продуктах SCAD, MSC.Patran-Nastran-2005, MathCAD : метод. указ. Челябинск : ЧГАУ, 2007. 66 с.; Жилкин В. А. Расчет на прочность и жесткость статически определимых балок в программных продуктах SCAD, MSC.Patran-Nastran-2005, MathCAD : метод. указ. Челябинск : ЧГАУ, 2007. 75 с.; Жилкин В. А., Шароухов В. В. Геометрическое моделирование в среде MSC.Patran-Nastran // Вестник ЧГАА. 2010. Т. 56. С. 160–250.
502
структоров, их производственным опытом, профессиональной интуицией и другими факторами. Автоматизированное проектирование позволяет значительно сократить субъективизм при принятии решений, повысить точность расчетов, выбрать наилучшие варианты для реализации на основе строгого математического анализа всех или большинства вариантов проекта с оценкой технических, технологических
иэкономических характеристик производства и эксплуатации проектируемого объекта, значительно повысить качество конструкторской документации, существенно сократить сроки проектирования и передачи конструкторской документации в производство, эффективнее использовать технологическое оборудование с программным управлением. Автоматизация проектирования способствует более полному использованию унифицированных изделий в качестве стандартных компонентов проектируемого объекта.
Внастоящее время в конструкторской практике используются специализированные интегрированные системы автоматизированного проектирования, в которых предусматривается полная автоматизация всех расчетных
ичертежных работ, а также технологической подготовки производства (проектирования технологической оснастки, опре-
деления оптимальных маршрутов, выбора оборудования и инструмента и др.). Кроме того, в них предусматривается полная или частичная автоматизация изготовления всей необходимой документации (чертежей, таблиц, текстов и др.). Для этой цели чаще всего используют программные продукты АПМ WinMachine, SCAD, СОSMOS, NASTRAN, ANSYS, ALGOR, COSМОS/Works 6.0 и др.
Анализ конструкций с использованием метода конечных элементов (МКЭ) является в настоящее время фактически мировым стандартом для прочностных и других видов расчетов конструкции. Основой этого служит универсальность МКЭ, позволяющая единым способом рассчитывать различные конструкции с разными свойствами материалов. Многовариантность способов моделирования конструкции
503
МКЭ влечет за собой большую вероятность появления скрытых ошибок, то есть ситуаций, когда результат анализа либо недостижим, либо абсурден, либо, что самое опасное и распространенное, правдоподобен, но не верен. Поэтому применение МКЭ требует от расчетчика более профессиональной подготовки. Чтобы с большой вероятностью получить достоверный результат, от пользователя пакета конечноэлементного анализа требуется знание принципов и методов реализации этого метода, глубокое понимание механики поведения конструкций в используемой области анализа и, наконец, владение методами выявления формальных и фактических ошибок.
МКЭ основан на мысленном представлении сплошного тела (континуума) в виде совокупности отдельных конечных элементов, взаимодействующих между собой в конечном числе узловых точек. В этих точках к каждому конечному элементу прикладываются некоторые фиктивные усилия взаимодействия, характеризующие действие распределенных внутренних напряжений, приложенных вдоль реальных границ стыковки смежных элементов. Если такая идеализация тела (конструкции) возможна, то проблема сводится к расчету системы с конечным числом степеней свободы.
Замена исходной конструкции совокупностью дискретных элементов подразумевает равенство энергий конструкции и ее дискретной модели. Для некоторых конструкций соблюдение энергетического баланса ведет к получению дискретной модели, точно описывающей поведение исходной конструкции. Это характерно для конструкций, которые уже состоят из отдельных элементов с дискретным сочленением их между собою. В качестве примера можно указать на фермы, рамы, стержневые перекрытия.
В стержневых системах конечным элементом является стержень, в котором напряжения и деформации определяются без особых затруднений по формулам сопротивления материалов. Чаще всего этот метод применяют в форме метода перемещений.
504
Плоская пластина произвольного очертания с помощью сечений, параллельных осям x и y, может быть представлена в виде совокупности прямоугольных и треугольных конечных элементов. Именно эти две формы конечных элементов нашли широкое использование при решении плоской задачи теории упругости.
При определении напряженного состояния трехмерных тел идеализация осуществляется уже с помощью объемных конечных элементов – параллелепипедов, тетраэдров и т. п., шарнирно скрепленных в узловых точках. При такой идеализации к каждой вершине конечного элемента прикладываются по координатным осям три составляющие усилий взаимодействия со смежными элементами.
Если же элементы реальной конструкции имеют вдоль своей границы непрерывные связи со смежными элементами, то при построении дискретной модели мы вынуждены делать некоторые априорные предположения о характере силового или кинематического взаимодействия между смежными элементами. В этом случае дискретная модель будет лишь приближенно отражать поведение исходной конструкции.
Очень важно выбрать характер взаимодействия между элементами таковым, чтобы уменьшение размеров конечных элементов привело к получению решения, стремящегося к точному.
Разбиение области на конечные элементы является первой операцией метода конечных элементов. Эта операция весьма ответственна. Здесь многое зависит от имеющихся инженерных навыков. Несовершенное разбиение будет приводить к значительным погрешностям расчета, если даже все остальные операции метода выполнены с достаточной точностью.
Использование более мелких конечных элементов, как правило, повышает точность решения, но приводит к увеличению общей трудоемкости расчета. В области изделия, где ожидается резкое изменение напряжений, деформаций, следует использовать более мелкую разбивку на элементы.
505

Там же, где ожидаемый результат изменяется по области сравнительно слабо, можно использовать при дискретизации более крупные элементы.
Пусть требуется выполнить расчет прямого консольного бруса, жестко защемлённого на одном торце и загруженного сосредоточенной силой на другом (рис. П.1). Представим заданный брус в виде двух линейных конечных элементов, первый из которых имеет узлы 1 и 2, а второй – узлы 2 и 3, т. е. узел 2 является общим для соседних конечных элементов.
Рис. П.1 |
Рис. П.2 |
Прежде чем решать конкретную задачу, уясним свойства линейного конечного элемента.
Рассмотрим абстрактный линейный конечный элемент длиной L с узлами i, j и жесткостью поперечного сечения EJy (рис. П.2). Свяжем с элементом прямоугольную декартовую правую локальную систему координат xOz: ось x направим от узла i к узлу j. Выразим перемещения любой точки конечного элемента через линейные wi , w j и угловые 1 , 2 перемещения его узлов.
При прямом поперечном изгибе бруса каждое его сечение имеет две степени свободы: сечение бруса может поступательно перемещаться в направлении оси z на величину w и может поворачиваться относительно нейтральной оси y на угол . Поэтому при прямом поперечном изгибе каждая точка элемента с узлами i и j имеет те же две степени свободы. Так как конечный элемент представлен двумя узлами, то он имеет четыре степени свободы. В самом простом варианте прогиб любой точки x элемента, представляющего часть упругой
506

линии бруса, можно описать полиномом третьего порядка с четырьмя коэффициентами:
w a |
a x a |
x2 a x3 . |
(П.1) |
|
1 |
2 |
3 |
4 |
|
Прогиб и угол поворота поперечного сечения бруса связаны зависимостью
dw |
|
dx , |
|
откуда с учетом зависимости (П.1) |
|
a2 2a3 x 3a4 x2 . |
(П.2) |
Воспользовавшись граничными условиями: при x 0
w wi , i ; при x L w w j , j , – и выражениями (П.1), (П.2), получим систему четырёх алгебраических урав-
нений для определения коэффициентов функции перемещений w x :
wi a1 ;
1 a2 ;
w j a1 a2L a3L2 a4L3 ;
j a2 2a3L 3a4L2 ,
решая которую
,
507
получим выражение прогибов участка бруса в любой его точке через перемещения узлов – основных неизвестных задачи:
|
|
|
|
|
|
|
|
2 |
|
|
3 |
|
|
|
|
|
|
|
|
x |
2 |
3 |
|
|
|
w x |
1 |
3 |
x |
2 |
x |
wi |
x |
2 |
|
|
x |
|
i |
||||||||||||
2 |
3 |
|
L |
2 |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
L |
|
L |
|
|
|
|
|
|
|
|
L |
|
|
||||
|
2 |
|
|
3 |
|
|
|
|
x |
2 |
|
3 |
|
|
|
|
|
|
|
|
|||||
|
3 |
x |
2 |
x |
|
w j |
|
|
|
x |
|
j . |
|
|
|
|
(П.3) |
||||||||
2 |
3 |
|
|
2 |
|
|
|
|
|||||||||||||||||
|
|
L |
|
|
L |
|
|
|
|
L |
|
|
L |
|
|
|
|
|
|
|
|
||||
Теперь, зная длину элемента L, перемещения в узлах конечного элемента wi , w j , 1 , 2 и координату какой-либо точки x, можно определить прогиб и угол поворота поперечного сечения бруса.
Громоздкую запись последней формулы можно устранить, записав ее в матричном виде. Введем вектор узловых перемещений конечного элемента e в виде
|
|
|
|
wi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
e |
|
w j |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(П.4) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Введём вектор формы элемента N |
|
||||||||||||||||||||||||||
|
|
|
1 |
3 |
x2 |
|
|
2 |
|
x3 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
3 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
L |
|
|
||||||||
|
|
|
|
x 2 |
|
x2 |
|
|
x3 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
2 |
|
(П.5) |
||||||||||
N |
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
. |
||||||||||||
|
|
|
|
3 |
|
x |
2 |
|
|
|
2 |
|
x3 |
|
|
|
|||||||||||
|
|
|
|
|
L2 |
|
L3 |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
x3 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
2 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
||||||||||||
Теперь выражение (П.3) можно записать в матричной форме:
w N |
|
|
|
|
|
|
|
|
|
|
|
T |
|
e |
|
, |
(П.6) |
|
|
|
где верхний индекс T – операция транспонирования матрицы.
508
По (10.6) и (10.34)
|
z |
|
|
z d2w |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
dx2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
или |
|
|
d2 N T |
e |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
z |
z B |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e |
|
, |
|
(П.7) |
|||
|
|
|
|
|
|
dx2 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
6x |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L3 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
L2 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
6x |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
2 |
w2 B e |
; B |
|
|
|
|
|
2 |
|
|
|||||||||||||
d |
|
|
|
L |
|
|
|
|
L |
|
, |
(П.8) |
|||||||||||
dx |
|
|
|
|
|
|
|
|
6 |
|
|
6x |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
L2 |
|
|
L3 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
6x |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
L2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
компоненты вектора B |
получены путём вычисления вто- |
||||||||||||||||||||||
рых производных от компонент вектора N . |
|
|
|||||||||||||||||||||
Согласно закону Гука, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
E Ez B |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(П.9) |
||||||||||
|
|
|
|
|
|
|
|
|
|
e . |
|
|
|
|
|
|
|
|
|
||||
Из (10.9) следует зависимость |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
My |
|
x Jy |
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
позволяющая записать вектор узловых нагрузок: |
|
||||||||||||||||||||||
F EJy B e . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(П.10) |
||||||||
Итак, зависимости (П.7), (П.9), (П.10) позволяют определить вектора относительных деформаций, напряжений
и узловых нагрузок по известному вектору узловых перемещений e .
509

Истинные перемещения любой деформированной конструкции обеспечивают минимум полной энергии деформаций.
Перепишем зависимость для удельной потенциальной энергии (5.29) в матричной форме:
|
1 |
|
|
|
|
1 |
1 |
T |
1 |
|
|
||
u |
1 1 |
2 2 |
3 3 |
|
|
2 |
|
|
2 |
|
|
||
2 |
2 |
|
|
|
|
||||||||
|
|
|
|
|
|
3 |
|
|
3 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
T , |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
1
где 2 – вектор напряжений;
3
1
2 – вектор относительных деформаций.
3
Энергия, накопленная в балочном элементе, определяется зависимостью (5.39):
|
|
|
|
1 |
|
|
|
|
1 |
L |
M |
y |
T |
1 |
M |
y |
|
|
|
|||||||||
U |
udV |
|
|
T dV |
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
z dF dx |
|||||||||
2 |
2 |
|
J |
|
|
E |
|
J |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
y |
|
|
y |
|
|
||||||||||||||||
|
V |
|
|
|
|
V |
|
|
|
|
0 F |
|
|
|
|
|
|
|
|
|||||||||
1 L MT |
1 |
|
M |
dx 1 |
L d2w T |
EJ |
d2w dx |
|
|
|||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
||||||||||||||||||||
2 0 |
Y |
EJy |
|
|
|
y |
2 |
|
|
|
|
|
y |
|
2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
0 dx |
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|||||||||
1 L B e T EJy B e dx
2 0
1 e T L B T EJy B dx e .
2 0
Выражение
ke L B T EJy B dx
0
510

Рис. П.3
Рис. П.4
называется матрицей жесткости конечного элемента (КЭ). Следовательно, энергия, накопленная в балочном элементе, определяется по формуле
U |
1 |
|
|
|
T |
k |
|
|
|
|
|
|
|
|
e |
|
e |
e |
. |
(П.11) |
|||||||
|
2 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Матрицу жесткости |
e элемента |
||||||
|
|
ij |
|
можно вычислить непосредственно. |
|||||||||
|
|
Элементы матрицы жесткости КЭ пред- |
|||||||||||
|
|
ставляют собой реакции в узлах от еди- |
|||||||||||
|
|
ничных |
|
перемещений. В |
поперечных |
||||||||
|
|
сечениях бруса при прямом поперечном |
|||||||||||
|
|
изгибе возникают только два внутрен- |
|||||||||||
|
|
них силовых фактора: поперечная сила |
|||||||||||
|
|
Qz |
|
и изгибающий момент My . На рас- |
|||||||||
четных схемах рис. П.3 и рис. П.4 единичные перемещения будем изображать положительными.
Для консольного бруса, жестко заделанного на правом торце и нагруженного на свободном левом торце парой сил, максимальные линейные w и угловые перемещения определяются зависимостями (10.36) и (10.37):
wmax ML2 ; max ML ,
2EJy EJy
а для консольного бруса, загруженного сосредоточенной силой, – зависимостями (10.38) и (10.39):
wmax |
QL3 |
; max |
QL2 |
. |
3EJy |
|
|||
|
|
2EJy |
||
Задаём в узле i единичное перемещение wi 1 , а все остальные перемещения в узлах i и j равны нулю:
wi 1 wi Q wi M QiL3 MiL2 ;
3EJy 2EJy
511

i 0 i Q i M QiL2 MiL2 .
2EJy 2EJy
Из полученной системы уравнений определяем внутренние силовые факторы Qi и Mi :
Qi |
|
|
12EJy |
; |
|
|
|
|
|
|
|
|
|
(а) |
||||||
|
|
|
L3 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Mi |
|
|
6EJ |
y |
. |
|
|
|
|
|
|
|
|
|
|
|
(б) |
|||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Реакции в заделке (в узле j): |
|
|
|
|
|
|
||||||||||||||
Qj |
|
12EJ |
y |
; |
|
|
|
|
|
|
(в) |
|||||||||
3 |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
L |
|
|
|
|
|
12EJy |
|
6EJy |
|
6EJy |
|
|
|||
M |
|
Q L M |
|
|
|
|
|
. |
(г) |
|||||||||||
|
|
|
L2 |
L2 |
|
|||||||||||||||
|
j |
|
|
|
i |
|
|
|
|
|
i |
|
|
|
L2 |
|
||||
Запишем уравнения (а)-(г) в матричной форме:
|
|
|
12EJy |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
||
Qi |
|
|
|
|
L |
|
|
|
|
|
|
|
6EJy |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Mi |
|
|
2 |
|
|
|
|||
|
|
|
|
|
|
L |
|
|
|
Qj |
|
|
12EJy |
||||||
|
|
|
|
3 |
|
|
|||
Mj |
|
|
|
|
L |
|
|
|
|
|
|
|
|
6EJ |
y |
||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
L2 |
|
|
|
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
1 |
|
|
0 |
0 |
0 |
|
|
|
|
|
|
|
|
0 |
(П.12) |
|
|
|
|
|
|
. |
|
0 |
0 |
0 |
|
0 |
|
|
|
|
|
|
|||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
Используя подобную процедуру и устанавливая значения перемещений wi 0 ; i 1 ; w j 0 ; j 0 , получим
512
;
|
6EJ |
|
|
|
|
|
|
|
|
|
||||
Qi |
|
|
y |
; |
|
|
|
|
|
|
|
(д) |
||
|
L2 |
|
|
|
|
|
|
|||||||
Mi |
|
4EJy |
. |
|
|
|
|
|
|
|
(е) |
|||
|
|
|
L |
|
|
|
|
|
|
|
|
|
||
Реакции в заделке (в узле j): |
|
|
|
|
|
|||||||||
Qj |
6EJ |
y |
; |
|
|
|
|
|
|
(ж) |
||||
3 |
|
|
|
|
|
|
|
|||||||
|
|
|
L |
|
|
|
|
|
|
|
|
|
||
Mj QiL Mi |
6EJy |
|
4EJy |
|
2EJy |
. |
(3) |
|||||||
|
L |
|
||||||||||||
|
|
|
|
|
|
|
|
L |
|
L |
|
|||
Уравнения (д)-(з) в матричной форме имеют вид
|
|
|
0 |
|
6EJy |
|||
|
|
|
|
|
|
|
||
|
|
|
|
2 |
|
|||
Qi |
|
|
|
|
L |
|||
|
|
4EJy |
||||||
|
|
|
||||||
|
|
|
0 |
|
|
|
|
|
|
|
L |
||||||
Mi |
|
|
|
|||||
|
|
|
|
|
|
6EJy |
||
Qj |
|
0 |
|
|||||
|
|
|||||||
|
|
|
|
|
|
2 |
|
|
Mj |
|
|
|
|
L |
|||
|
|
|
|
2EJy |
|
|||
|
|
|
0 |
|
||||
|
|
|
|
L |
||||
|
|
|
|
|
|
|||
0 |
0 |
|
|
|
|
|
|
|
|
||
|
|
|
0 |
|
|
0 |
0 |
|
|
|
|
|
|
|
1 |
|
(П.13) |
|
|
|
|
. |
|
0 |
0 |
|
0 |
|
|
|
|
|
|
||
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
|
|
Аналогично, полагая wi 0 ; i 0 ; w j 1 ; j 0 и wi 0 ; i 0 ; w j 0 ; j 1 и объединяя все матричные уравнения типа (П.12), (П.13), мы получим
513
|
|
|
12EJy |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
||
Qi |
|
|
|
|
L |
|
|
|
|
|
|
|
6EJy |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Mi |
|
|
2 |
|
|
|
|||
|
|
|
|
|
|
L |
|
|
|
Qj |
|
|
12EJy |
||||||
|
|
|
|
3 |
|
|
|||
Mj |
|
|
|
|
L |
|
|
|
|
|
|
|
|
6EJ |
y |
||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
L2 |
|
|
|
|
6EJ |
y |
|
12EJ |
y |
|
6EJ |
y |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|||||
|
|
L |
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
L |
|
|
|
|
|
1 |
|
|
|
4EJy |
|
6EJy |
|
|
|
|
2EJy |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
L |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
L |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
. |
(П.14) |
||
|
6EJy |
12EJy |
|
|
|
|
6EJy |
1 |
|
|
|||||||||||||||
|
2 |
|
|
|
|
|
3 |
|
|
|
|
|
2 |
|
|
|
|
|
|
||||||
|
|
L |
|
|
|
|
|
|
L |
|
|
|
|
|
|
L |
|
|
|
|
1 |
|
|
||
|
2EJ |
y |
|
|
|
|
6EJ |
y |
|
|
|
|
4EJ |
y |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
L |
|
|
|
|
L2 |
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|||
Первый сомножитель в правой части зависимости (П.14) является матрицей жесткости балочного элемента
|
|
|
12EJ |
y |
|
6EJ |
y |
|
12EJ |
y |
|
6EJ |
y |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
3 |
|
|
|
|
|
|
2 |
|
|
|
|
3 |
|
|
|
|
|
|
2 |
|
|
|||||||
|
|
|
|
|
|
L |
|
|
|
|
|
|
L |
|
|
|
|
|
|
L |
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
6EJy |
|
|
|
|
4EJy |
|
6EJy |
|
|
|
|
2EJy |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
e |
|
|
|
L2 |
|
|
|
|
|
|
L |
|
|
L2 |
|
|
|
|
|
|
L |
|
(П.15) |
||||||||
k |
|
|
|
|
12EJy |
|
|
6EJy |
12EJy |
|
|
|
|
|
|
|
|
|
, |
|||||||||||||
|
|
|
|
|
|
|
|
|
6EJy |
|
||||||||||||||||||||||
|
|
|
|
L3 |
|
|
|
L2 |
|
|
|
|
L3 |
|
|
|
|
L2 |
|
|
|
|
||||||||||
|
|
|
|
|
6EJ |
y |
|
|
|
|
2EJ |
y |
|
|
|
|
|
6EJ |
y |
|
|
|
|
4EJ |
y |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
L2 |
|
|
|
|
|
|
L |
|
|
|
L2 |
|
|
|
|
|
|
L |
|
|
|
|
|
|||
второй вектор – вектор единичных перемещений. Для других перемещений это уравнение является уравнением прямого поперечного изгиба элемента ij:
|
|
|
12EJy |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
||
Qi |
|
|
|
|
L |
|
|
|
|
|
|
|
6EJy |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Mi |
|
|
2 |
|
|
|
|||
|
|
|
|
|
|
L |
|
|
|
Qj |
|
|
12EJy |
||||||
|
|
|
|
3 |
|
|
|||
Mj |
|
|
|
|
L |
|
|
|
|
|
|
|
|
6EJ |
y |
||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
L2 |
|
|
|
|
6EJ |
|
|
12EJ |
y |
|||||||
|
|
|
y |
|
|
|
|
|||||
|
|
2 |
|
|
|
|
3 |
|
|
|
||
|
|
L |
|
|
|
|
|
|
L |
|
|
|
|
4EJy |
|
6EJy |
|
|
|
||||||
|
|
L |
|
|
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
6EJy |
12EJy |
|
|
|
|||||||
|
2 |
|
|
|
|
|
3 |
|
|
|
||
|
|
L |
|
|
|
|
L |
|
|
|
||
|
2EJy |
|
|
6EJy |
|
|
|
|||||
|
|
L |
|
|
|
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
6EJy |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||
|
|
L |
|
|
|
|
wi |
|
|
2EJy |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
L |
|
|
|
i |
||
|
|
|
|
|
|
|
. (П.16) |
|
|
6EJy |
w j |
||||||
L2 |
|
|
|
|
|
|||
|
4EJ |
y |
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
514
С помощью уравнения (П.16) можно решать задачи, в которых в одном направлении связаны несколько элементов.
Обобщённая матрица жесткости всей системы определяется в результате последовательного объединения матриц жесткости отдельных элементов. Этот этап расчета МКЭ является весьма ответственным и очень громоздким. Поэтому при практических расчетах формирование матрицы жесткости системы реализуется на ЭВМ. Мы же эту операцию для понимания процедуры конечно-элементного расчета проделаем «вручную».
Для дальнейших операций матрицу жесткости балочного конечного элемента удобно представить в виде
|
|
|
k |
k |
k |
k |
|
|
|
|
11 |
12 |
13 |
14 |
|
|
e |
|
k21 |
k22 |
k23 |
k24 |
|
k |
|
k31 |
k32 |
k33 |
k34 |
. |
|
|
|
|
|
k42 |
k43 |
k44 |
|
|
|
|
k41 |
|
|||
Внутренним силовым факторам будем приписывать два индекса mn, первый из которых будет соответствовать элементу, второй – узлу.
Итак, консольную балку мы аппроксимируем двумя конечными элементами, для каждого из которых можно записать уравнение (П.16):
Q |
|
|
k |
k |
k |
||||
|
11 |
|
|
|
11 |
|
12 |
|
13 |
M11 |
|
|
k21 |
k22 |
k23 |
||||
|
|
|
k31 |
k32 |
k33 |
||||
Q12 |
|
|
|||||||
M |
|
|
k |
41 |
k |
42 |
k |
43 |
|
|
12 |
|
|
|
|
|
|||
Q |
|
|
k |
k |
k |
||||
|
22 |
|
|
|
11 |
|
12 |
|
13 |
M22 |
|
|
k21 |
k22 |
k23 |
||||
|
|
|
k31 |
k32 |
k33 |
||||
Q23 |
|
|
|||||||
|
|
|
|
|
|
k42 |
k43 |
||
M23 |
|
|
k41 |
||||||
k |
w |
|
|
14 |
1 |
|
|
k24 |
1 |
|
|
k34 |
|
|
; |
w2 |
|
||
|
|
|
|
k44 |
|
|
|
2 |
|
||
k |
w |
|
|
14 |
|
2 |
|
k24 |
2 |
|
|
k34 |
|
|
. |
w3 |
|
||
|
|
|
|
k44 |
|
|
|
3 |
|
||
515
Определим систему сил, действующих на каждый узел, путём суммирования соответствующих усилий, действующих на элементы, сходящиеся в рассматриваемом узле.
Узел 1. В этот узел приходит только первый элемент, и поэтому
Q1 Q11 k11w1 k12 1 k13w2 k14 2 ; |
(и) |
M1 M11 k21w1 k22 1 k23w2 k24 2 . |
(к) |
Узел 2. В этом узле сходятся оба элемента, и поэтому |
|
Q2 Q12 Q22 k31w1 k32 1 k33w2 k34 2 |
|
k11w2 k12 2 k13w3 k14 4 k31w1 k32 1 |
|
k11 k33 w2 k12 k34 2 k13w3 k14 4 ; |
(л) |
M2 M12 M22 k41w1 k42 1 k43w2 k44 2 |
|
k21w2 k22 2 k23w3 k24 3 k41w1 k42 1 |
|
k21 k43 w2 k22 k44 2 k23w3 k24 3 . |
(м) |
Узел 3. В этот узел приходит только второй элемент, и поэтому |
|
Q3 Q23 k31w2 k32 2 k33w3 k34 3 ; |
(н) |
M3 M23 k41w2 k42 2 k43w3 k44 3 . |
(о) |
Переписывая уравнения (и)-(о) в матричной форме, получим матричное уравнение метода конечных элементов для принятой нами модели консольной балки:
Q1 |
k11 |
|
k12 |
k13 |
k14 |
0 |
||||
M1 |
k21 |
k22 |
k23 |
k24 |
0 |
|||||
Q2 |
|
k31 |
k32 |
k33 |
k11 |
k34 |
k12 |
k13 |
||
|
|
|
|
|
k42 |
k43 |
k21 |
k44 |
k22 |
k23 |
M2 |
|
k41 |
||||||||
Q3 |
|
|
0 |
0 |
k31 |
k32 |
k33 |
|||
|
|
|
|
|
|
k41 |
k42 |
k42 |
||
M3 |
|
|
0 |
0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
w1 |
|
0 |
|
|
|
1 |
|
k14 |
w2 |
|
k24 |
|
. (П.17) |
2 |
|
|
|
|
|
k34 |
|
|
w3 |
|
|
k44 |
3 |
|
|
|
|
516
Ведём обозначения
Q1 |
|
k11 |
k12 |
k13 |
k14 |
0 0 |
w1 |
|
|||||||||
M |
|
k |
21 |
k |
22 |
k |
23 |
k |
24 |
0 0 |
|
|
|
||||
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
||||
Q2 |
|
k31 |
k32 |
k33 k11 |
k34 k12 |
k13 |
k14 |
|
w2 |
|
|||||||
F |
|
; K |
|
|
k42 |
k43 k21 |
k44 k22 |
k23 |
|
|
|
; u |
, |
||||
M2 |
|
k41 |
k24 |
2 |
|
||||||||||||
Q |
|
|
0 0 |
k |
31 |
k |
32 |
k |
33 |
k |
34 |
|
w |
|
|||
3 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
||||
M3 |
|
|
0 0 |
k41 |
k42 |
k42 |
k44 |
|
3 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
придав тем самым уравнению (П.17) форму основного ма-
тричного уравнения метода конечных элементов:
|
, |
|
F K u |
(П.18) |
где F – вектор обобщённых сил (вектор объёмных и поверхностных сил, приложенных к вершинам элементов);
K – матрица жесткости конечно-элементного аналога конструкции;
u – вектор обобщённых перемещений.
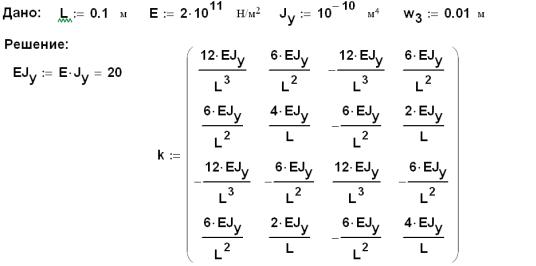
Зададим материал консольной балки и её геометрические характеристики: E 2 1011 Па, длины элементов – L = 0,1 м, осевой момент инерции – Jy 10 10 м4.
Пусть сила P вызвала перемещение вниз правого торца балки на 0,01 м, т. е. w3 0,01 .
ВычислимматрицужесткостиконсольнойбалкивMathCAD.
517

Обобщённые (узловые) силы пока не заданы, и компоненты глобального вектора узловых сил равны нулю:
00
F 0
0 .00
Зададим граничные условия. В узле № 1 имеет место жесткое защемление бруса, т. е. перемещение и угол поворота сечения в узле равны нулю, или w1 0 и 1 0 . Поэтому обнуляем первую и вторую строки и первый и второй столбцы матрицы жесткости, ставим на главные диагонали по 1. Получаем
518

Теперь из решения системы уравнений всегда будет
w1 0 и 1 |
0 . |
|
|
|
Зададим перемещение узла № 3 вниз на 10 мм, или |
||||
w3 0,01 |
м. Для этого сформируем некоторый вектор R |
|||
в виде |
|
|
|
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
|
|
R |
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
|
|
0.01 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
и получим измененный вектор F по алгоритму
F F K R ,
т. е. вычтем из вектора F произведение K R – усилия, возникающие в узлах КЭ модели балки, при смещении узла 3 вниз на 10 мм, а результат поместим снова в вектор F . Теперь вектор F выглядит как
.
519

Обнулим пятую строку и пятый столбец матрицы K , поставим в главной диагонали на пятой строке 1, поставим в векторе F на пятой строке –0,01. Граничное условие внесено, а матрица и вектор F имеют вид
Решаем систему уравнений (П.18). В результате получаем
,
т. е. w1 0 , 1 |
0 , w2 3,125 мм, 2 0,056 рад, |
w3 10 мм, 3 |
0,075 рад. Теперь, когда узловые пере- |
мещения найдены, можно подставить их в формулу (П.6) для перемещения w и построить упругую линию бруса.
Прежде чем это сделать, найдём силу P, вызвавшую перемещение конца консоли вниз на 10 мм:
P |
w3EJ |
y |
. |
|
|
|
|
3 |
|
|
|
|
|||
|
L |
|
|
|
|
|
|
В соответствии с теоретическим решением упругая ли- |
|||||||
ния описывается уравнением |
|
|
|
||||
EJyw x |
P x L 3 |
PL2 x |
PL3 . |
(Ф) |
|||
|
|||||||
|
|
6 |
2 |
6 |
|
||
520

Сопоставим результаты расчета по методу КЭ (формула П.6) и по формуле (Ф).
521

Приложение Б (дополнительное)
Ключи к вопросам ЕГЭ
Глава 1
Основные понятия, определения, допущения принципы
I |
II |
III |
IV |
V |
|
3 |
3 |
3 |
2 |
1 |
|
|
|
|
|
|
|
Модели прочностной надежности
III
34
Внутренние силы и напряжения
I |
II |
III |
|
|
|
|
|
2 |
4 |
4 |
|
|
|
|
|
Нормальнаяипоперечнаясилы, изгибающиймоментиихэпюры
I |
II |
III |
|
IV |
V |
VI |
|
|
|
|
|
|
|
3 |
1 |
4 |
|
4 |
1 |
1 |
|
|
Глава 3 |
|
|
|
|
Виды напряженного состояния |
|
|
|
|||
I |
II |
III |
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
Напряженное состояние в точке. Главные площадки и главные напряжения
I |
II |
III |
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
2 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Глава 4 |
|
|
|
|
|
Перемещения и деформации |
|
|
|
|
|||
I |
II |
III |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
3 |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Глава 5 |
|
|
|
|
|
Связь между напряжениями и деформациями |
|
|
|||||
I |
II |
III |
|
IV |
|
V |
|
3 |
2 |
2 |
|
3 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
Глава 6 |
|
|
|
|
|
Испытание конструкционных материалов на растяжение и сжатие
I |
II |
III |
IV |
|
2 |
4 |
2 |
3 |
|
|
|
|
|
|
522
Механические свойства материалов
I |
II |
III |
|
IV |
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Глава 8 |
|
|
|
|
|
Напряжения и деформации |
|
|
|
|
|||
I |
II |
III |
|
IV |
|
|
|
|
|
|
|
|
|
|
|
4 |
3 |
1 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
Расчеты стержней на прочность и жесткость |
|
|
|||||
I |
II |
III |
|
IV |
|
V |
|
|
|
|
|
|
|
|
|
4 |
3 |
4 |
|
2 |
|
2 |
|
|
|
Глава 9 |
|
|
|
|
|
Чистый сдвиг. Расчет на сдвиг (срез) |
|
|
|
|
|||
I |
II |
III |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Крутящий момент. Деформации и напряжения |
|
|
|||||
I |
II |
III |
|
IV |
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
4 |
|
2 |
|
|
|
Расчет на прочность при кручении |
|
|
|
|
|||
I |
II |
III |
|
IV |
|
V |
|
3 |
2 |
2 |
|
3 |
|
2 |
|
|
|
|
|
|
|
|
|
Расчет на жесткость при кручении |
|
|
|
|
|||
I |
II |
III |
|
IV |
|
V |
|
2 |
1 |
4 |
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
Глава 10 |
|
|
|
|
|
Напряжения в поперечном сечении балки |
|
|
|||||
I |
II |
III |
|
IV |
|
V |
|
1 |
4 |
2 |
|
4 |
|
4 |
|
|
|
|
|
|
|
|
|
Расчет балок на прочность |
|
|
|
|
|||
I |
II |
III |
|
IV |
|
V |
|
|
|
|
|
|
|
|
|
3 |
3 |
1 |
|
3 |
|
2 |
|
|
|
|
|
|
|
|
|
Перемещения при изгибе. Расчет балок на жесткость
I |
II |
III |
IV |
V |
|
|
|
|
|
|
|
2 |
3 |
4 |
2 |
4 |
|
|
|
|
|
|
|
523
Учебное издание
Жилкин Виталий Афанасьевич
Сопротивление материалов
Учебное пособие
Редактор
С. А. Медведева
Технический
редактор
М. В. Шингареева
Редакционно-издательский отдел Челябинской государственной агроинженерной академии 454080, г. Челябинск, пр. Ленина, 75
Формат 60×84/16. Объем 25,0 уч.-изд. л. Тираж 300 экз. Заказ №
УОП ЧГАА