

- •Содержание
- •Глава 1 - Общие сведения о газотурбинных двигателях
- •1.1 — Введение
- •1.2.1.2 — Турбовинтовые двигатели и вертолетные ГТД
- •1.2.1.3 — Двухконтурные турбореактивные двигатели (ТРДД)
- •1.2.1.4 — Двигатели для самолетов вертикального взлета и посадки
- •1.2.1.5 - Комбинированные двигатели для больших высот и скоростей полета
- •1.2.1.6 - Вспомогательные авиационные ГТД и СУ
- •1.2.2 - Авиационные СУ
- •1.2.3 - История развития авиационных ГТД
- •1.2.3.1 - Россия
- •1.2.3.2 - Германия
- •1.2.3.3 – Англия
- •1.3 - ГТД наземного и морского применения
- •1.3.1 - Области применения наземных и морских ГТД
- •1.3.1.1 -Механический привод промышленного оборудования
- •1.3.1.2 - Привод электрогенераторов
- •1.3.1.3 - Морское применение
- •1.3.2 - Основные типы наземных и морских ГТД
- •1.3.2.1 - Стационарные ГТД
- •1.3.2.2 - Наземные и морские ГТД, конвертированные из авиадвигателей
- •1.3.2.3 - Микротурбины
- •1.4 - Основные мировые производители ГТД
- •1.4.1 - Основные зарубежные производители ГТД
- •1.4.2 - Основные российские производители ГТД
- •1.6 - Перечень использованной литературы
- •Глава 2 - Основные параметры и требования к ГТД
- •2.1 - Основы рабочего процесса ГТД
- •2.1.1 - ГТД как тепловая машина
- •2.1.1.1 – Простой газотурбинный цикл
- •2.1.1.2 - Применение сложных циклов в ГТД
- •2.1.2 - Авиационный ГТД как движитель
- •2.1.3 - Полный к.п.д. и топливная эффективность (экономичность) ГТД
- •2.2 - Параметры ГТД
- •2.2.1 - Основные параметры авиационных ГТД
- •2.2.2 - Основные параметры наземных и морских приводных ГТД
- •2.3 - Требования к авиационным ГТД
- •2.3.1 - Требования к тяге (мощности)
- •2.3.2 – Требования к габаритным и массовым характеристикам
- •2.3.3 - Возможность развития ГТД по тяге (мощности)
- •2.3.4 - Требования к используемым горюче-смазочным материалам
- •2.3.4.1 - Топлива авиационных ГТД
- •2.3.4.2 – Авиационные масла
- •2.3.4.3 - Авиационные гидравлические жидкости
- •2.3.5 – Надежность авиационных ГТД
- •2.3.5.1 – Основные показатели
- •2.3.5.1.1 – Показатели безотказности, непосредственно влияющие на безопасность работы двигателя
- •2.3.5.2 – Методология обеспечения надежности
- •2.3.5.2.1 – Этап проектирования
- •2.3.6 - Ресурс авиационных ГТД
- •2.3.6.1 - Методология обеспечения ресурса
- •2.3.6.2 - Количественные показатели ресурса
- •2.3.7 - Требования производственной технологичности
- •2.3.8 - Требования эксплуатационной технологичности
- •2.3.8.1 - Эксплуатационная технологичность - показатель совершенства ГТД
- •2.3.8.2 - Основные качественные характеристики ЭТ
- •2.3.8.3 - Количественные показатели ЭТ
- •2.3.9 - Экономические требования к авиационным ГТД
- •2.3.9.1 - Себестоимость производства
- •2.3.9.2 - Стоимость ЖЦ двигателя
- •2.3.10 - Экологические требования
- •2.3.10.2 - Ограничения по шуму
- •2.3.12 - Соответствие требованиям летной годности
- •2.4 - Особенности требований к ГТД наземного применения
- •2.4.1 - Особенности требований к приводным ГТД для ГПА
- •2.4.1.1 - Требования к характеристикам ГТД
- •2.4.1.2 - Требования к ресурсам и надежности
- •2.4.1.4 - Используемые ГСМ
- •2.4.1.5 - Требования экологии и безопасности
- •2.4.1.6 - Требования производственной и эксплуатационной технологичности
- •2.4.2 - Особенности требований к ГТД энергетических установок
- •2.4.2.1 - Требования к характеристикам ГТД
- •2.4.2.2 - Используемые ГСМ
- •2.4.2.3 - Требования к ресурсам и надежности
- •2.4.2.4 - Требования к экологии и безопасности
- •2.4.2.5 - Требования к контролепригодности, ремонтопригодности и др.
- •2.5 - Методология проектирования
- •2.5.1 - Основные этапы проектирования ГТД
- •2.5.1.1 - Техническое задание
- •2.5.1.2 – Техническое предложение
- •2.5.1.3 – Эскизный проект
- •2.5.1.4 – Технический проект
- •2.5.1.5 – Разработка конструкторской документации
- •2.5.2 - Разработка конструкций ГТД на основе базовых газогенераторов
- •2.5.2.1 - Газогенератор – базовый узел ГТД
- •2.5.2.2 – Основные параметры и конструктивные схемы газогенераторов ГТД
- •2.5.2.3 – Создание ГТД различного назначения на базе единого газогенератора
- •2.6.1.1 — Общие положения по авиационным ГТД
- •2.6.1.2 — Общие положения по сертификации наземной техники
- •2.6.1.3 — Общие положения по сертификации производства и СМК
- •2.6.1.4 — Органы регулирования деятельности
- •2.6.1.4.1 — Авиационная техника
- •2.6.1.4.2 — Органы регулирования деятельности по сертификации производства и СМК
- •2.6.2.1 — Авиационная техника
- •2.6.2.2 — Наземная техника
- •2.6.2.3 Производство и СМК
- •2.6.2.4 — Принятые сокращения и обозначения
- •2.6.3.1 — Основные этапы создания авиационных ГТД
- •2.6.3.2 — Этапы процесса сертификации авиационных ГТД
- •Глава 3 - Конструктивные схемы ГТД
- •3.1 - Конструктивные схемы авиационных ГТД
- •3.1.1 - Турбореактивные двигатели
- •3.1.2 - Двухконтурные турбореактивные двигатели
- •3.1.3 - Турбовинтовые и вертолетные ГТД
- •3.2 - Конструктивные схемы наземных и морских ГТД
- •3.2.1 - Одновальные ГТД
- •3.2.2 - ГТД со свободной силовой турбиной
- •3.2.3 - ГТД со «связанным» КНД
- •3.2.4 - Конструктивные особенности наземных ГТД различного назначения
- •3.2.5 - Конструктивные особенности ГТД сложных циклов
- •3.4 - Перечень использованной литературы
- •Глава 4 - Силовые схемы ГТД
- •4.1 - Усилия, действующие в ГТД
- •4.1.2 - Крутящие моменты от газовых сил
- •Глава 5 - Компрессоры ГТД
- •6.4.4 - Корпуса КС
- •6.4.4.1 - Наружный корпус КС
- •6.4.4.2 - Внутренний корпус КС
- •6.4.4.3 - Разработка конструкции корпусов
- •6.4.5 - Системы зажигания ГТД
- •6.5 - Экспериментальная доводка КС
- •6.6 - Особенности КС двигателей наземного применения
- •6.7 - Перспективы развития камер сгорания ГТД
- •Глава 7 - Форсажные камеры
- •7.1 - Характеристики ФК
- •7.2 - Работа ФК
- •7.3 - Требования к ФК
- •7.4 - Схемы ФК
- •7.4.2 - Вихревые ФК
- •7.4.3 - ФК с аэродинамической стабилизацией
- •7.5 - Основные элементы ФК
- •7.5.1 - Смеситель
- •7.5.2 - Диффузоры
- •7.5.3 - Фронтовые устройства
- •7.5.4 - Корпусы и экраны
- •7.6 - Управление работой ФК
- •7.6.1 - Розжиг ФК
- •7.6.2 - Управление ФК на режимах приемистости и сброса
- •7.6.3 - Управление ФК на стационарных режимах
- •Глава 8 - Турбины ГТД
- •8.2 - Аэродинамическое проектирование турбины
- •8.2.2 - Технология одномерного проектирования турбины
- •8.2.4 - 2D/3D-моделирование невязкого потока в проточной части турбины
- •8.2.5 - 2D/3D-моделирование вязкого потока в турбине
- •8.2.6 - Синтез геометрии профилей и лопаточных венцов
- •8.2.7 - Одномерное проектирование турбины
- •8.2.7.1 - Выбор количества ступеней ТВД
- •8.2.7.2 - Выбор количества ступеней ТНД
- •8.2.7.3 - Аэродинамическое проектирование и к.п.д. турбины
- •8.2.9 - Методы управления пространственным потоком в турбине
- •8.2.10 - Экспериментальное обеспечение аэродинамического проектирования
- •8.2.11 - Перечень использованной литературы
- •8.3 - Охлаждение деталей турбины
- •8.3.1 - Тепловое состояние элементов турбин
- •8.3.1.1 - Принципы охлаждения
- •8.3.2 - Конвективное, пленочное и пористое охлаждение
- •8.3.3 - Гидравлический расчет систем охлаждения
- •8.3.4 - Методология расчета температур основных деталей турбин
- •8.3.5 - Расчет полей температур в лопатках
- •8.3.6 - Перечень использованной литературы
- •8.4 - Роторы турбин
- •8.4.1 - Конструкции роторов
- •8.4.1.1 - Диски турбин
- •8.4.1.2 - Роторы ТВД
- •8.4.1.3 - Роторы ТНД и СТ
- •8.4.1.4 - Примеры доводки и совершенствования роторов
- •8.4.1.5 - Предотвращение раскрутки и разрушения дисков
- •8.4.2 - Рабочие лопатки турбин
- •8.4.2.1 - Соединение рабочих лопаток с диском
- •8.4.3 - Охлаждение рабочих лопаток
- •8.4.4 - Перечень использованной литературы
- •8.5 - Статоры турбин
- •8.5.1 - Корпусы турбин
- •8.5.2 - Сопловые аппараты
- •8.5.3 - Аппараты закрутки
- •8.5.4 – Перечень использованной литературы
- •8.6 - Радиальные зазоры в турбинах
- •8.6.1 - Влияние радиального зазора на к.п.д. турбины
- •8.6.2 - Изменение радиальных зазоров турбины в работе
- •8.6.3 - Управление радиальными зазорами
- •8.6.4 - Выбор радиального зазора при проектировании
- •8.6.5 - Перечень использованной литературы
- •8.7 - Герметизация проточной части
- •8.7.1 - Герметизация ротора и статора от утечек охлаждающего воздуха
- •8.7.2 - Уплотнения между ротором и статором
- •8.7.3 - Перечень использованной литературы
- •8.8 - Материалы основных деталей турбины
- •8.8.1 - Диски и роторные детали турбины
- •8.8.2 - Сопловые и рабочие лопатки
- •8.8.3 - Покрытия лопаток
- •8.8.4 - Корпусы турбин
- •8.9.1 - Перечень использованной литературы
- •8.10.1 - Прогары и трещины лопаток ТВД
- •8.10.3 - Недостаточный циклический ресурс и поломки роторных деталей
- •8.10.4 - Устранение дефектов турбины в ходе доводки
- •8.11 - Перспективы развития конструкций и методов проектирования турбин
- •8.11.1 - 2D-аэродинамика: эффективные охлаждаемые лопатки ТВД
- •8.11.2 - 2D-аэродинамика: сокращение количества лопаток
- •8.11.3 - Противоположное вращение роторов ТВД и ТНД
- •8.11.4 - 2D-аэродинамика: эффективные решетки профилей ТНД
- •8.11.5 - 3D-аэродинамика: эффективные формы лопаточных венцов
- •8.11.6 - Новые материалы и покрытия для лопаток и дисков
- •8.11.7 - Совершенствование конструкций охлаждаемых лопаток
- •8.11.8 - Оптимизированные системы управления радиальными зазорами
- •8.11.9 - Развитие средств и методов проектирования
- •Глава 9 - Выходные устройства ГТД
- •9.1 - Нерегулируемые сопла
- •9.2 - Выходные устройства ТРДД
- •9.2.1 - Выходные устройства со смешением потоков
- •9.2.2 - Выходные устройства ТРДД с раздельным истечением потоков
- •9.3 - Регулируемые сопла
- •9.3.1 - Осесимметричные регулируемые сопла
- •9.3.1.1 - Регулируемое сопло двигателя Д30-Ф6
- •9.3.2 - Плоские сопла
- •9.4 - Выходные устройства двигателей самолетов укороченного и вертикального взлета-посадки
- •9.5 - «Малозаметные» выходные устройства
- •9.6 - Реверсивные устройства
- •9.6.1 - Реверсивные устройства ковшового типа
- •9.6.2 - Реверсивные устройства створчатого типа
- •9.6.3.1 - Гидравлический привод реверсивного устройства
- •9.6.3.3 - Механический замок фиксации положения реверсивного устройства
- •9.7 - Приводы выходных устройств
- •9.7.1 - Пневмопривод
- •9.7.2 - Пневмомеханический привод
- •9.8 - Выходные устройства диффузорного типа
- •9.8.1 - Конические диффузоры
- •9.8.2 - Осекольцевые диффузоры
- •9.8.3 - Улитки
- •9.8.4 - Соединения с выхлопными шахтами
- •9.8.5 - Выходные устройства вертолетных ГТД
- •9.12 - Перечень использованной литературы
- •Глава 10 - Привод агрегатов, редукторы, муфты ГТД
- •10.1 - Привод агрегатов ГТД
- •10.1.1 - Центральный привод
- •10.1.2 - Коробки приводов агрегатов
- •10.2 - Редукторы ГТД
- •10.2.1 - Редукторы ТВД
- •10.2.1.1 - Общие требования, кинематические схемы
- •10.2.1.2 - Конструкция редукторов ТВД
- •10.2.2 - Редукторы привода несущего и рулевого винтов вертолетов
- •10.2.2.1 - Редукторы привода несущего винта
- •10.2.2.1.1 - Кинематические схемы главных редукторов вертолетов
- •10.2.2.1.2 - Конструкция главных редукторов вертолетов
- •10.2.2.2 - Редукторы хвостовые и промежуточные
- •10.2.3 - Редукторы ГТУ
- •10.2.3.1 - Конструкция редукторов
- •10.3 - Муфты приводов ГТД и ГТУ
- •10.3.1 - Требования к муфтам
- •10.3.2 - Конструкция муфт
- •10.4 - Проектирование приводов агрегатов ГТД
- •10.4.1 - Проектирование центрального привода
- •10.4.1.1 - Конструкция центрального привода
- •10.4.2 - Проектирование коробок приводов агрегатов
- •10.4.2.1 - Конструкция коробки приводов агрегатов
- •10. 5 - Проектирование редукторов
- •10.5.1 - Особенности проектирования редукторов ТВД
- •10.5.2 - Особенности проектирования вертолетных редукторов
- •10.5.3 - Особенности проектирования редукторов ГТУ
- •10.6.1 - Требования к зубчатым передачам
- •10.6.2 - Классификация зубчатых передач
- •10.6.3 - Исходный производящий контур
- •10.6.4 - Нагруженность зубчатых передач
- •10.6.5 - Конструктивные параметры зубчатых передач
- •10.6.5.1 - Конструкции зубчатых колес
- •10.6.6 - Материалы зубчатых колес, способы упрочнения
- •Глава 11 - Пусковые устройства
- •11.1 - Общие сведения
- •11.1.1 - Основные типы пусковых устройств современных ГТД
- •11.1.2 - Технические характеристики пусковых устройств современных ГТД
- •11.2 - Электрические пусковые устройства ГТД
- •11.3 - Воздушные пусковые устройства ГТД
- •11.3.1 - Воздушно - турбинные пусковые устройства ГТД
- •11.3.2 - Регулирующие и отсечные воздушные заслонки
- •11.3.3 - Струйное пусковое устройство ГТД
- •11.4 - Турбокомпрессорные пусковые устройства ГТД
- •11.4.1 - Классификация ТКС ГТД
- •11.4.2 - Принцип действия ТКС
- •11.4.3 - Одновальный ТКС
- •11.4.4 - ТКС со свободной турбиной
- •11.4.5 - Особенности систем ТКС
- •11.5 - Гидравлические пусковые устройства ГТД
- •11.5.1 - Конструкция гидравлических стартеров
- •11.6 - Особенности пусковых устройств ГТД наземного применения
- •11.6.1 - Электрические пусковые устройства
- •11.6.2 - Газовые пусковые устройства
- •11.6.3 - Гидравлические пусковые устройства
- •11.7 - Редукторы пусковых устройств
- •11.8 - Муфты свободного хода пусковых устройств
- •11.8.1 - Муфты свободного хода роликового типа
- •11.8.2 – Муфты свободного хода храпового типа
- •11.9 – Системы смазки пусковых устройств
- •11.11 - Перечень используемой литературы
- •Глава 12 - Системы ГТД
- •12.1.1 - Системы автоматического управления и контроля авиационных ГТД
- •12.1.1.1 - Назначение САУ
- •12.1.1.2 - Состав САУ
- •12.1.1.3 - Основные характеристики САУ
- •12.1.1.5.2 - Порядок разработки САУ
- •12.1.1.5.3 - Основные принципы выбора варианта САУ в процессе проектирования
- •12.1.1.5.4 - Структурное построение САУ
- •12.1.1.5.5 - Программы управления ГТД
- •12.1.1.5.6 - Расчет и анализ показателей надежности
- •12.1.2 - САУ наземных ГТУ
- •12.1.2.1 - Назначение САУ
- •12.1.2.2 - Выбор САУ ГТУ и ее элементов
- •12.1.2.3 - Состав САУ ГТУ
- •12.1.2.4 - Основные характеристики САУ
- •12.1.2.5 - Работа САУ ГТУ
- •12.1.2.6 - Блок управления двигателем (БУД)
- •12.1.2.7 - Особенности системы контроля и диагностики наземных ГТД
- •12.1.4 – Перечень использованной литературы
- •12.2 - Топливные системы ГТД
- •12.2.1 - Топливные системы авиационных ГТД
- •12.2.1.1 - Назначение топливной системы
- •12.2.1.2 - Состав топливной системы
- •12.2.1.3 - Основные характеристики топливной системы
- •12.2.1.4 - Работа топливной системы
- •12.2.1.5 - Выбор топливной системы и ее элементов
- •12.2.1.5.1 – Выбор топливной системы
- •12.2.1.5.2 - Выбор насосов топливной системы
- •12.2.1.5.3 - Определение подогревов топлива в топливной системе
- •12.2.1.5.5 - Математическая модель топливной системы
- •12.2.1.6 - Гидроцилиндры
- •12.2.1.7 - Топливные фильтры
- •12.2.2 - Особенности топливных систем ГТУ
- •12.2.2.1 - Назначение топливной системы
- •12.2.2.2 - Выбор топливной системы и ее элементов
- •12.2.2.3 - Основные характеристики топливной системы
- •12.2.2.4 - Работа топливной системы
- •12.2.4 – Перечень использованной литературы
- •12.3 - Системы диагностики
- •12.3.1 - Общие вопросы диагностирования
- •12.3.1.1 - Задачи диагностирования ГТД
- •12.3.1.3 - Диагностируемые системы ГТД
- •12.3.1.4 - Виды наземного и бортового диагностирования ГТД
- •12.3.1.5 - Структура систем диагностики
- •12.3.1.6 - Регламент диагностирования ГТД
- •12.3.1.7 - Регистрация параметров ГТД
- •12.3.2 - Диагностирование системы механизации ГТД, САУ и ТП ГТД
- •12.3.3 - Диагностирование работы маслосистемы и состояния узлов ГТД, работающих в масле
- •12.3.3.1 - Неисправности маслосистемы и узлов ГТД, работающих в масле
- •12.3.3.2 - Диагностирование по параметрам маслосистемы
- •12.3.3.3 - Контроль содержания в масле частиц износа (трибодиагностика)
- •12.3.4 - Контроль и диагностика по параметрам вибрации ГТД
- •12.3.4.1 - Параметры вибрации и единицы изменения
- •12.3.4.2 - Статистические характеристики вибрации
- •12.3.4.3 - Причины возникновения вибрации в ГТД
- •12.3.4.4 - Датчики измерения вибрации
- •12.3.4.5 - Вибрационная диагностика ГТД
- •12.3.5 - Диагностирование ГТД по газодинамическим параметрам
- •12.3.5.1 - Неисправности проточной части ГТД
- •12.3.5.2 - Требования к перечню контролируемых параметров
- •12.3.5.3 - Алгоритмы диагностирования проточной части ГТД
- •12.3.6 - Обеспечение диагностирования ГТД инструментальными методами
- •12.3.6.1 - Виды неисправностей, выявляемых инструментальными методами
- •12.3.6.2 - Методы и аппаратура инструментальной диагностики
- •12.3.6.2.1 - Оптический осмотр проточной части ГТД
- •12.3.6.2.2 - Ультразвуковой метод диагностирования
- •12.3.6.2.3 - Вихретоковый метод диагностирования
- •12.3.6.2.4 - Капиллярный метод диагностирования с применением портативных аэрозольных наборов
- •12.3.6.2.5 - Диагностирование состояния проточной части ГТД перспективными методами
- •12.3.7 - Особенности диагностирования технического состояния ГТД наземного применения на базе авиационных двигателей
- •12.3.7.1 - Особенности режимов эксплуатации
- •12.3.7.2 - Общие особенности диагностирования наземных ГТД
- •12.3.7.3 - Особенности диагностирования маслосистемы
- •12.3.7.5 - Особенности диагностирования проточной части
- •12.4 - Пусковые системы
- •12.4.1 - Пусковые системы авиационных ГТД
- •12.4.1.1 - Назначение
- •12.4.1.2 - Общие требования
- •12.4.1.3 - Состав пусковых систем
- •12.4.1.4 - Область эксплуатации двигателя, область запуска
- •12.4.1.6 - Надежность запуска
- •12.4.1.7 - Характеристики запуска
- •12.4.1.8. - Выбор типа и параметров стартера
- •12.4.1.9 - Особенности запуска двигателей двухроторных схем
- •12.4.1.10 - Системы зажигания
- •12.4.1.11 - Обеспечение характеристик запуска на разгоне
- •12.4.1.12 - Регулирование компрессора на пусковых режимах
- •12.4.2 - Особенности пусковых систем наземных ГТУ
- •12.4.4 - Перечень использованной литературы
- •12.5 - Воздушные системы ГТД
- •12.5.1 - Функции ВС
- •12.5.2 - Основные требования к ВС
- •12.5.3 - Общие и локальные ВС ГТД
- •12.5.4 - Работа локальных ВС
- •12.5.4.1 - ВС охлаждения турбин ГТД
- •12.5.4.2 - ВС наддува и охлаждения опор
- •12.5.4.2.1 - Работа ВС наддува и охлаждения опор
- •12.5.4.2.2 - Типы ВС наддува и охлаждения опор
- •12.5.4.2.3 - Построение общей схемы ВС наддува и охлаждения опор
- •12.5.4.3 - Противообледенительная система (ПОС)
- •12.5.4.4 - Система кондиционирования воздуха
- •12.5.4.5 - Система активного управления зазорами
- •12.5.4.6 - Системы внешнего охлаждения ГТД
- •12.5.4.7 - Системы внешнего обогрева ГТД
- •12.5.5 - Подготовка воздуха для ВС ГТД
- •12.5.6 - Особенности ВС наземных ГТУ
- •12.5.7 - Агрегаты ВС
- •12.5.9 - Перечень использованной литературы
- •12.6.1 - Общие требования
- •12.6.2 - Схемы маслосистем ГТД
- •12.6.2.1 - Маслосистема с регулируемым давлением масла
- •12.6.2.2 - Маслосистема с нерегулируемым давлением масла
- •12.6.2.3 - Маслосистемы ГТД промышленного применения
- •12.6.3 - Маслосистемы редукторов
- •12.6.3.1 - Маслосистемы авиационных редукторов
- •12.6.3.2 - Маслосистемы редукторов ГТУ
- •12.6.4 - Особенности проектирование маслосистем
- •12.6.5 - Агрегаты маслосистемы
- •12.6.5.1 - Бак масляный
- •12.6.5.2 - Насосы масляные
- •12.6.5.3 - Теплообменники
- •12.6.5.4 - Фильтры и очистители
- •12.6.5.5 - Воздухоотделители и суфлеры
- •12.6.6 - Перспективы развития маслосистем
- •12.6.8 – Перечень использованной литературы
- •12.7 - Гидравлические системы ГТД
- •12.7.1 - Гидросистемы управления реверсивными устройствами
- •12.7.1.1 - Централизованная гидросистема управления реверсивным устройством
- •12.7.1.2 - Автономная гидросистема управления реверсивным устройством
- •12.7.1.3 - Порядок проектирования гидросистем
- •12.7.3 - Перечень использованной литературы
- •12.8 - Дренажные системы
- •12.8.1 - Назначение и классификация систем
- •12.8.2 - Характеристика объектов дренажа
- •12.8.3 - Основные схемы и принцип действия систем
- •12.8.4 - Основные требования к дренажным системам
- •12.8.5 - Обеспечение работоспособности дренажных систем
- •12.8.6 - Особенности конструкции дренажных баков
- •12.8.8 - Перечень использованной литературы
- •Глава 13 - Обвязка авиационных ГТД
- •13.1 - Общая характеристика обвязки
- •13.2 - Конструкция обвязки
- •13.2.1 - Трубопроводные коммуникации
- •13.2.1.1 - Основные сведения
- •13.2.1.2 - Трубы и патрубки
- •13.2.1.3 - Соединения
- •13.2.1.4 - Компенсирующие устройства
- •13.2.1.5 - Соединительная арматура
- •13.2.1.6 - Узлы крепления
- •13.2.1.7 - Неисправности трубопроводов
- •13.2.2 - Электрические коммуникации
- •13.2.2.1 - Общие сведения
- •13.2.2.2 - Конструкция элементов
- •13.2.2.2.1 - Электрические жгуты
- •13.2.2.2.2 - Электрические провода
- •13.2.2.2.3 - Электрические соединители
- •13.2.2.2.4 - Материалы для изготовления электрических жгутов
- •13.2.3 - Узлы крепления агрегатов и датчиков
- •13.2.4 - Механическая проводка управления
- •13.3 - Проектирование обвязки
- •13.3.1 - Требования к обвязке
- •13.3.2 - Основные принципы и порядок проектирования обвязки
- •13.3.3 - Методы отработки конструкции обвязки
- •13.3.3.1 - Натурное макетирование
- •13.3.3.2 - Электронное макетирование обвязки
- •13.3.5 - Проектирование трубопроводных коммуникаций
- •13.3.6 - Проектирование электрических коммуникаций
- •13.3.6.1 - Требования к электрическим коммуникациям
- •13.3.6.2 - Порядок проектирования электрических коммуникаций
- •13.3.6.3 - Разработка электрических схем
- •13.3.6.4 - Разработка монтажных схем
- •13.3.6.5 - Разработка чертежей электрических жгутов
- •13.6 - Перечень использованной литературы
- •Глава 14 - Динамика и прочность ГТД
- •14.1 - Теоретические основы динамики и прочности ГТД
- •14.1.1 - Напряженное состояние, тензор напряжений
- •14.1.2 - Уравнения равновесия
- •14.1.3 - Перемещения в деформируемом твердом теле. Тензор деформаций
- •14.1.4 - Уравнения совместности деформаций
- •14.1.5 - Обобщенный закон Гука
- •14.1.7 - Плоская задача теории упругости
- •14.1.8 - Пластическая деформация материала. Простое и сложное нагружение
- •14.1.11 - Ползучесть. Релаксация напряжений. Длительная прочность
- •14.1.12 - Усталостное разрушение элементов конструкций
- •14.1.13 - Малоцикловая усталость. Термическая усталость
- •14.1.14 - Накопление повреждений при нестационарном нагружении
- •14.1.15 - Закономерности развития трещин в элементах конструкций
- •14.1.16 - Свободные колебания системы с одной степенью свободы
- •14.1.17 - Вынужденные колебания системы с одной степенью свободы
- •14.1.18 - Колебания системы с вязким сопротивлением. Демпфирование колебаний
- •14.1.19 - Вынужденные колебания системы с одной степенью свободы под действием произвольной периодической возмущающей силы
- •14.1.21 - Колебания системы с распределенной массой
- •14.2 - Статическая прочность и циклическая долговечность лопаток
- •14.2.1 - Нагрузки, действующие на лопатки. Расчетные схемы лопаток
- •14.2.2 - Напряжения растяжения в профильной части рабочей лопатки от центробежных сил
- •14.2.3 - Изгибающие моменты и напряжения изгиба от газодинамических сил
- •14.2.5 - Суммарные напряжения растяжения и изгиба в профильной части лопатки
- •14.2.6 - Температурные напряжения в лопатках
- •14.2.7 - Особенности напряженного состояния широкохордных рабочих лопаток
- •14.2.9 - Расчет соединения рабочих лопаток с дисками
- •14.2.10 - Расчет на прочность антивибрационных (бандажных) полок и удлинительной ножки лопатки
- •14.2.11 - Особенности расчета на прочность лопаток статора
- •14.2.13 - Анализ трехмерных полей напряжений и деформаций в лопатках
- •14.3 - Статическая прочность и циклическая долговечность дисков
- •14.3.1 - Расчетные схемы дисков
- •14.3.2 - Расчет напряжений в диске в плоской оссесимметричной постановке
- •14.3.3 - Общие закономерности напряженного состояния дисков
- •14.3.7 - Подтверждение циклического ресурса дисков на основе концепции допустимых повреждений
- •14.3.8 - Расчет роторов барабанного типа
- •14.3.9 - Расчет дисков радиальных турбомашин
- •14.3.10 - Оптимальное проектирование дисков. Равнопрочный диск
- •14.4 - Колебания и вибрационная прочность лопаток осевых компрессоров и турбин
- •14.4.2 - Приближенный расчет собственных частот колебаний лопаток
- •14.4.3 - Трехмерные модели колебаний лопаток
- •14.4.4 - Влияние конструктивных и эксплуатационных факторов на собственные частоты колебаний лопатки
- •14.4.6 - Автоколебания лопаток
- •14.4.7 - Демпфирование колебаний лопаток
- •14.4.8 - Вынужденные колебания лопаток. Резонансная диаграмма
- •14.4.9 - Математическое моделирование вынужденных колебаний лопаток
- •14.4.10 - Экспериментальное исследование колебаний лопаток
- •14.4.11 - Коэффициент запаса вибрационной прочности лопаток, пути его повышения
- •14.4.12 - Колебания дисков
- •14.5 - Динамика роторов. Вибрация ГТД
- •14.5.1 - Критическая частота вращения ротора. История вопроса
- •14.5.2 - Динамика одномассового ротора. Поступательные перемещения
- •14.5.3 - Динамика одномассового ротора. Угловые перемещения
- •14.5.4 - Динамика одномассового несимметричного ротора
- •14.5.5 - Ротор с распределенными параметрами
- •14.5.6 - Особенности колебаний системы роторов и корпусов
- •14.5.7 - Демпфирование колебаний роторов
- •14.5.7.1 - Конструкция и принцип действия демпферов колебаний роторов
- •14.5.7.2 - Расчет параметров демпфирования
- •14.5.7.3 - Особенности гидромеханики реальных демпферов
- •14.5.8 - Вибрация ГТД
- •14.5.8.1 - Источники возмущающих сил и спектр вибрации
- •14.5.8.3 - Статистические характеристики вибрации
- •14.5.8.4 - Измерение и нормирование вибрации
- •14.6 - Прочность корпусов и подвески двигателя
- •14.6.1 - Силовая схема корпуса. Условия работы силовых корпусов
- •14.6.4 - Устойчивость корпусных деталей
- •14.6.5 - Расчет корпусов на непробиваемость
- •14.6.6 - Расчет элементов подвески
- •14.8 – Перечень использованной литературы
- •Глава 15 - Шум ГТД
- •15.1 - Источники шума ГТД
- •15.3 - Методы оценки акустических характеристик
- •15.4 - Снижение шума ГТД
- •15.4.1 - Методология проектирования систем шумоглушения
- •15.4.2 - Шумоглушение в выходных устройствах авиационных ГТД
- •15.4.3 - Конструкция звукопоглощающих узлов авиационных ГТД
- •15.4.4 – Глушители шума в наземных ГТУ
- •15.4.5 – Конструкция глушителей шума наземных ГТД
- •15.7 – Список использованной литературы
- •Глава 16 - Газотурбинные двигатели как силовой привод
- •16.1 - ГТД в силовом приводе ГТЭС и ГПА
- •16.2 - ГТД в силовых (энергетических) установках кораблей и судов
- •16.3 - ГТД в силовых установках танков
- •16.5 - Компоновка корабельных и судовых ГГТД
- •16.6 - Компоновка ГТД в силовой установке танка
- •16.8 – Перечень использованной литературы
- •Глава 17 - Автоматизация проектирования и поддержки жизненного цикла ГТД
- •17.1 - Проектирование и информационная поддержка жизненного цикла ГТД (идеология CALS)
- •17.2 - Жизненный цикл изделия. Обзор методов проектирования
- •17.3 - Программные средства проектирования
- •17.4 - Аппаратные средства систем проектирования
- •17.5 - PDM-системы: роль и место в организации проектирования
- •17.6 - Организация производства и ERP-системы
- •17.7 - Параллельный инжиниринг. Интеграция эскизного и технического проектирования
- •17.8 - Переход на безбумажную технологию
- •17.10 - ИПИ-технологии и эксплуатация изделий
- •17.11 - ИПИ-технологии и управление качеством
- •17.12 - Анализ и реинжиниринг бизнес-процессов
- •17.13 - Основы трехмерного проектирования
- •17.13.1 - Общие принципы трехмерного проектирования
- •17.13.1.1 - Способы создания геометрических моделей
- •17.13.1.2 - Основные термины объемной геометрической модели
- •17.13.1.3 - Принцип базового тела
- •17.13.1.4 - Основные термины при проектировании геометрической модели детали
- •17.13.2 - Управляющие структуры
- •17.13.3 - Принцип «Мастер-модели»
- •17.13.5 - Моделирование сборок
- •17.15 - Перечень использованной литературы
- •Глава 18 - Уплотнения в ГТД
- •18.1 - Уплотнение неподвижных соединений
- •18.2 - Уплотнения подвижных соединений
- •18.2.1 - Гидравлический расчет уплотнений подвижных соединений
- •18.3 - Уплотнение газового тракта между ротором и статором ГТД
- •18.3.1 - Лабиринтные уплотнения
- •18.3.2 - Щеточные уплотнения
- •18.3.3 - Скользящие сухие уплотнения газодинамические
- •18.3.4 - Скользящие сухие уплотнения газостатические
- •18.3.5 - Сравнение эффективностей уплотнений газового тракта между ротором и статором ГТД
- •18.4 - Примеры уплотнений газового тракта ГТД
- •18.4.1 - Пример 1
- •18.4.2 - Пример 2. Уплотнение статорной и роторной частей турбины
- •18.5 - Уплотнения масляных полостей опор роторов, редукторов, коробок приводов
- •18.7 - Перечень использованной литературы
Глава 14 - Динамика и прочность ГТД
Рисунок 14.1.20_4 - Колебания упругой системы с n степенями свободы
Составляя выражения прогиба для всех n масс, придем к системе однородных уравнений, аналогичной (14.1.20-3), которую удобно записать в матричной форме:
(p2 [α |
m |
] - [E]) {y |
} = 0 |
(14.1.20-8) |
ij |
j |
0 |
|
|
ãäå [E] - единичная матрица порядка n; {y0} - вектор амплитудных прогибов.
Частотное уравнение получается после приравнивания нулю определителя системы:
| p2 [α |
m |
] - [E]| = 0 |
(14.1.20-9) |
ij |
j |
|
|
Уравнение (14.1.20-9) дает значения n собственных частот колебаний p1, p2…pn, и каждой ча- стоте соответствует своя форма колебаний. С математической точки зрения, отыскание собственных частот и форм колебаний системы с конечным числом степеней свободы сводится к расчету собственных чисел и векторов матрицы (14.1.20-9).
Если на колебательную систему с n степенями свободы действует нагрузка, изменяющаяся во времени по гармоническому закону с частотой Ω, система может иметь n резонансных режимов при совпадении этой частоты с любой из собственных частот. Условие резонанса имеет вид:
Ω = pk , k = 1,2,3,…n |
(14.1.20-10) |
14.1.21 - Колебания системы с распределенной массой
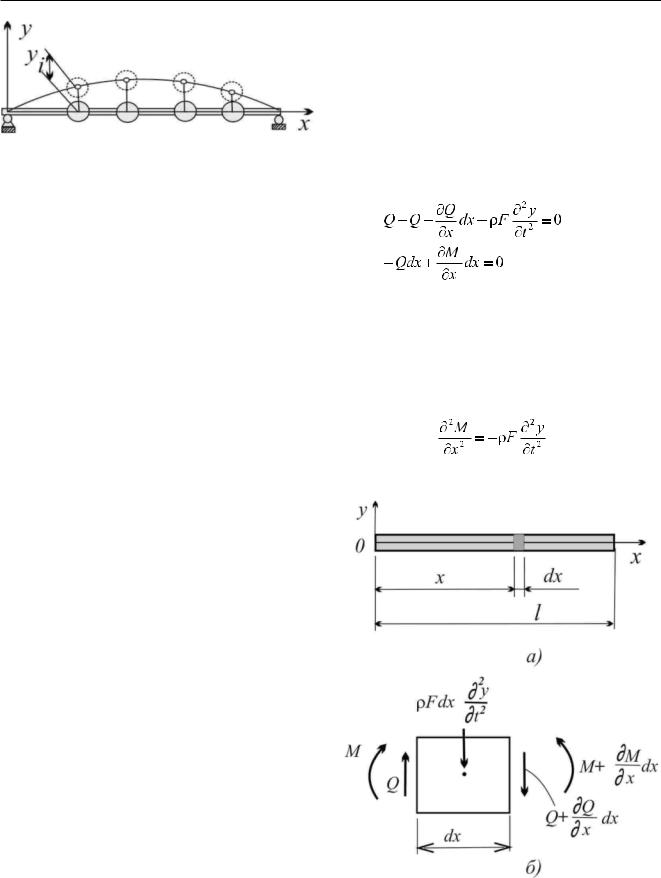
В качестве примера системы с непрерывно распределенной массой рассмотрим стержень, изготовленный из материала с плотностью ρ (напомним, что в предыдущих разделах стержень считался невесомым). Рассмотрим изгибные колебания стержня (см. Рис. 14.1.21_1а). Масса, приходящаяся на единицу длины стержня равна ρF (ãäå F-
площадь поперечного сечения стержня, вообще говоря, не постоянная по его длине).
Будем считать, что стержень имеет плоскость симметрии xOy, и колебания происходят в этой плоскости. На Рис. 14.1.21_1б показан малый элемент стержня длиной dx, а также внешние и внутренние силы, действующие на него. Условия равновесия сил на ось y и условие равенства моментов имеют вид:
(14.1.21-1)
ãäå Q - перерезывающая сила;
M - изгибающий момент.
Выражая Q из второго уравнения и подставляя в первое, получаем:
(14.1.21-2)
Рисунок 14.1.21_1 - Колебания стержня с распределенной массой
961

Глава 14 - Динамика и прочность ГТД
Воспользуемся известным из сопротивления материалов уравнением изогнутой линии балки:
(14.1.21-3)
ãäå E - модуль упругости материала;
I - момент инерции поперечного сечения стержня.
Подставляя (14.1.21-3) в (14.1.21-2) получаем уравнение изгибных колебаний стержня:
(14.1.21-4)
Таким образом, исследование колебаний стержня с распределенной массой сводится к анализу дифференциального уравнения четвертого порядка в частных производных.
В случае стержня постоянного сечения это уравнение имеет постоянные коэффициенты и несколько упрощается:
(14.1.21-5)
ãäå 



Уравнение колебаний должно быть дополнено начальными и граничными условиями.
Рассмотрим собственные частоты и формы колебаний на примере стержня постоянного поперечного сечения. При колебаниях стержня с одной из собственных частот p, его прогибы в некоторой произвольной точке изменяются во времени по гармоническому закону:
y(x,t) = X(x)·(Acos pt + B sin pt) (14.1.21-6)
ãäå X(x) - неизвестная функция координаты, задающая распределение амплитуд колебаний по длине стержня;
À, Â - коэффициенты, определяются начальными условиями.
Подставляя в (14.1.20-8) получаем уравнение для неизвестной функции X(x)
(14.1.21-7)
Решение этого уравнения позволяет определить неизвестную функцию X(x), если заданы гранич- ные условия.
Рассмотрим решение на примере стержня, свободно опертого по концам. В этом случае уравнение (14.1.21-7) дополняется граничными условиями равенства нулю перемещений и изгибающих моментов на концах стержня при x = 0 è x = L. Равенство нулю изгибающих моментов в соответствии с (14.1.21-3) сводится к равенству нулю вторых производных перемещения на концах стержня:
y(0) =y(L) = 0,
(14.1.21-8)
Этим условиям и уравнению (14.1.21-7) соответствует семейство функций (вывод опускаем, можно проверить подстановкой):
Xk(x) = sin(kπx / L), k = 1, 2, 3... (14.1.21-9)
Подставляя в (14.1.21-7) получаем, что каждому зна- чению k соответствует своя собственная частота:



 , k = 1, 2, 3... (14.1.21-10)
, k = 1, 2, 3... (14.1.21-10)
Соответствующий этой частоте период колебаний равен:
(14.1.21-11)
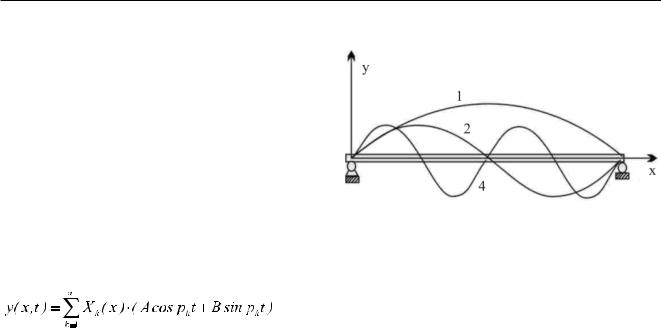
Отсюда видно, что система с распределенной массой имеет бесконечное количество собственных частот и форм колебаний; каждой собственной частоте соответствует своя форма. Спектр собственных частот представляет собой бесконечный дискретный ряд значений. Несколько низших собственных форм колебаний рассматриваемого стержня приведены на Рис. 14.1.21_2 (цифрами обозначены номера соответствующих собственных частот).
962
Глава 14 - Динамика и прочность ГТД
Анализ собственных частот и форм колебаний стержней с другими граничными условиями, а также стержней переменного сечения можно найти, например, в [14.8.9].
Подстановка (14.1.21-9) в (14.1.21-6) дает бесконечное множество частных решений уравнения колебаний (14.1.21-5):
yk(x,t) = Xk(x) (A cos pkt + B sin pkt), k = 1,2,3…
Путем сложения частных решений можно представить любые поперечные колебания стержня:
(14.1.21-12)
Знание собственных форм колебаний позволяет определить распределение напряжений в теле в момент максимального отклонения от положения равновесия и, благодаря этому, определить опасные точки и сечения при резонансных колебаниях по той или иной форме.
Можно показать, что если на стержень с распределенной массой действует нагрузка, изменяющаяся во времени по гармоническому закону с частотой Ω, система может иметь бесконечное число резонансных режимов при совпадении этой частоты с любой из собственных частот. Условие резонанса имеет вид:
Ω = pk, k = 1,2,3... (14.1.21-13)
Возможна ситуация, когда при выполнении этого условия резонанс не возникает. Это возможно, например, если сосредоточенная переменная сила приложена в точке, которая при соответствующей форме колебаний не имеет перемещения. Такие точки называются узлами. Напротив, если переменная сила приложена в зоне, где при соответствующей форме колебаний перемещения велики, резонансный режим наиболее опасен.
Колебания системы с распределенной массой рассмотрены выше на примере поперечных колебаний стержня в одной их плоскостей симметрии профиля. Положенные в основу стержневой модели допущения (одноосное напряженное состояние, гипотеза плоских сечений) выполняются с достаточной точностью лишь в случаях, когда один из размеров тела значительно превышает остальные
Рисунок 14.1.21_2 - Собственные формы колебаний свободно опертого стержня
размеры. Применительно к анализу колебаний существует еще одно ограничение – стержневые модели непригодны для расчета высших собственных частот колебаний. В этих случаях необходимо использовать трехмерные модели и численные методы, например, метод конечных элементов.
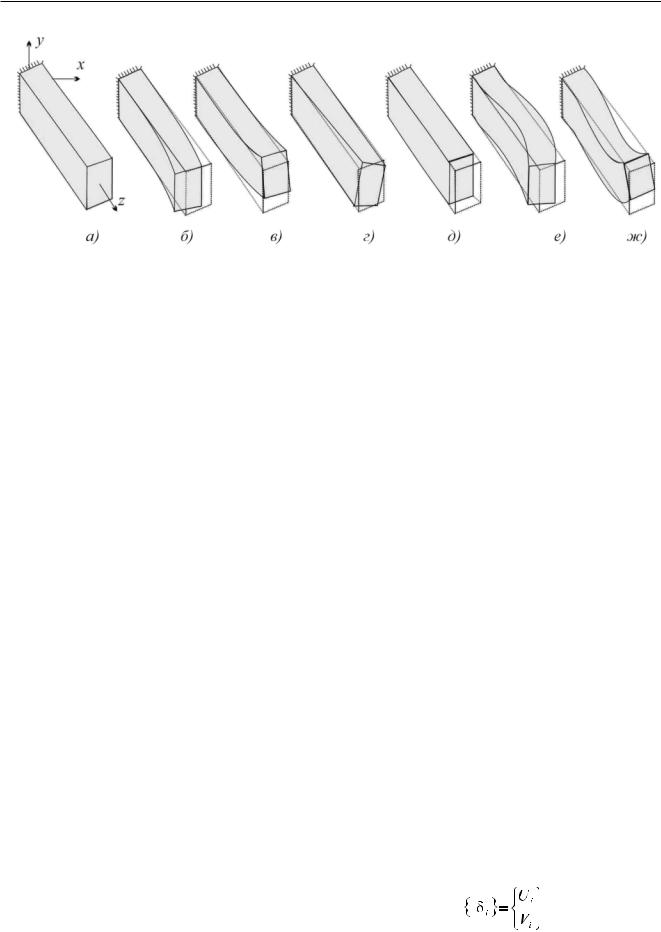
Для того, чтобы продемонстрировать ограни- ченность стержневых моделей, рассмотрим несколько собственных форм, получающихся при трехмерном анализе колебаний призматического стержня прямоугольного сечения (см. Рис. 14.1.21_3). Приведены первые изгибные формы колебаний в плоскостях xOz è yOz (см. Рис. 14.1.21_3б,в), первая крутильная форма (г) и форма продольных колебаний (д), а также вторая изгибная форма колебаний в плоскости xOz è yOz (е и ж). Название форм определяется характером деформации тела в положении максимального отклонения от положения равновесия. При приведенных собственных формах форма поперечного сечения в процессе колебаний не искажается, поперечные сечения лишь перемещаются (д) или поворачиваются вокруг осей x è y при изгибных колебаниях, z – при крутильных. Более высоким собственным частотам соответствуют более сложные изгибные и крутильные, а также смешанные формы.
Следует отметить, что приведенный выше модальный анализ (так называют анализ собственных частот и форм колебаний) с использованием стержневой модели показал лишь изгибные формы колебаний и только в одной плоскости. Трехмерный анализ более трудоемок, но дает значительно больше информации о возможных резонансных режимах. Низшие собственные частоты колебаний с достаточной для инженерных расчетов точностью определяются на базе стержневых моделей. Для расчета высших собственных частот необходимо использовать трехмерные модели.
963
Глава 14 - Динамика и прочность ГТД
Рисунок 14.1.21_3 - Низшие собственные формы колебаний призматического стержня (результаты трехмерного модального анализа)
14.1.22 - Концепция метода конеч- ных элементов
Анализ напряженно-деформированного состояния и колебаний деталей ГТД в ответственных случаях требует решения краевых задач механики деформируемого твердого тела. В силу сложности формы деталей использовать аналитические методы решения таких задач не удается, и приходится прибегать к численным методам. Наиболее распространенным в инженерной практике решения задач прочности и колебаний стал метод конечных элементов (МКЭ), реализованный в компьютерных системах инженерного анализа. Его основные достоинства: универсальность, широкий круг решаемых задач (статика, динамика, устойчивость, упругость, пластичность, ползучесть, контактные задачи, температурные напряжения и т.д.), простота алгоритмизации.
В общих чертах, идея метода конечных элементов состоит в следующем.
-Исследуемая деталь (тело) разбивается воображаемыми линиями или поверхностями на большое число конечных элементов простой формы (призмы, пирамиды, треугольники и т.д.), размеры которых значительно меньше размеров тела.
-Перемещение в любой произвольной точке конечного элемента однозначно определяется че- рез перемещения в его вершинах (узловых точках)
ñпомощью функции перемещений. Она выбирается линейной, параболической и т.д. таким образом, чтобы обеспечить необходимую точность аппроксимации перемещений и напряжений внутри элемента.
-Заданное с помощью функции перемещений поле перемещений внутри элемента дает возможность выразить деформации и напряжения внутри элемента через узловые перемещения. Например, при линейной аппроксимации перемещений деформация и напряжение в каждом элементе получаются постоянными.
-Задача, состоявшая в решении системы дифференциальных уравнений в частных производных, сводится к решению системы алгебраических уравнений и отысканию перемещений в узловых точках. Эта процедура перехода от неизвестных функций к неизвестным их значениям в отдельных узловых точках называется дискретизацией.
-Перемещения в узлах определяются из условий равновесия системы конечных элементов под действием приведенных к узлам внешних сил.
-По найденным узловым перемещениям определяются поля напряжений и деформаций в элементах и детали в целом.
Рассмотрим эту процедуру на самом простом примере расчета плоского напряженного состояния
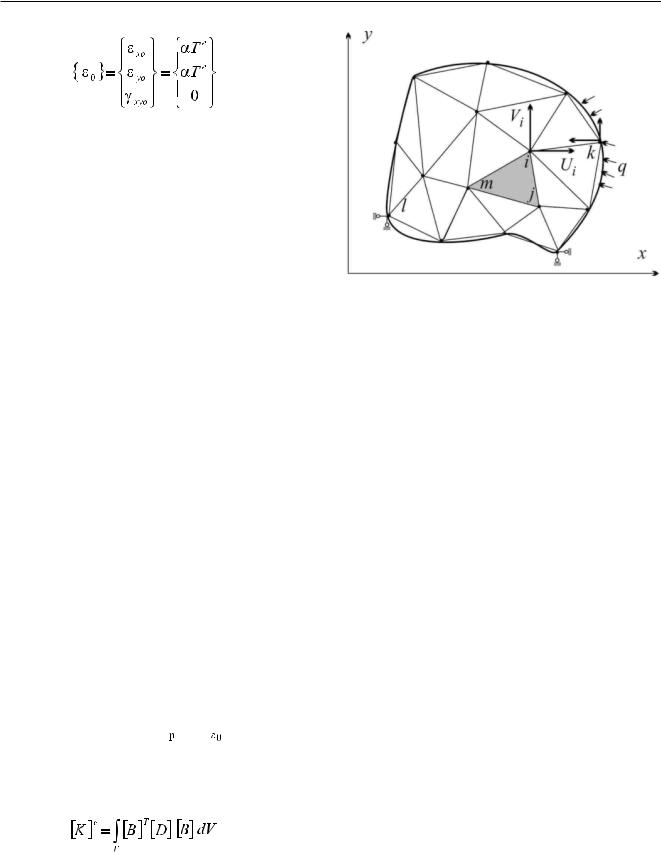
âупругом теле. Исследуемая конструкция представляет собой пластинку, нагруженную внешними силами на границе (см. Рис. 14.1.22_1) и закрепленную в нескольких точках.
Исследуемую область разобьем на треугольные
элементы (см. Рис. 14.1.22_1), узлы типичного элемента e обозначим i, j, m. Перемещения δ â i-м узле имеют две составляющие (проекции на оси x и y)
 ,
,
964

Глава 14 - Динамика и прочность ГТД
а вектор всех перемещений в элементе выглядит как:




 .
.
Примем простейшую линейную аппроксимацию перемещений внутри элемента (х, у - координаты в пределах элемента):
U = α1 + α2x + α3y;
V = α4 + α5x + α6y, (14.1.22-1)
ãäå α1…α6 - коэффициенты аппроксимации.
Для их определения подстановкой в (14.1.22-1) координат и перемещений узловых точек составляются две системы по три уравнения. Например, одна из них для перемещений в направлении оси õ имеет вид:
(14.1.22-2)
ледовательности i, j, m.
Общая деформация в любой точке элемента для случая плоского напряженного состояния имеет вид:
(14.1.22-4)
Продифференцировав уравнения (14.1.22-1) и (14.1.22-2), получаем в матричном виде:
{ε} = [B] {δ}e, |
(14.1.22-5) |
где матрица узловых координат:
.
Решая их, получим для перемещений U è V внутри элемента выражения:
Обобщенный закон Гука, выражающий связь между напряжениями и деформациями при упругом поведении материала, с учетом тепловых деформаций имеет вид (см. раздел 14.1.19):
(14.1.22-3)
ài = xjym - xmyj; bi = yj - óm; ñi = xm - xj,
ãäå ∆ - площадь треугольника ijm. Коэффициенты a, b, ñ с индексами j è m получа- ются циклической перестановкой индексов в пос-
{σ} = [D] ({ε} - {ε0}) |
(14.1.22-6) |
ãäå {ε0} - вектор начальной тепловой деформации; [D] - матрица упругости материала, которая
для изотропного материала и плоского напряженного состояния имеет вид:
(14.1.22-7)
Вектор тепловой деформации имеет вид:
965
Глава 14 - Динамика и прочность ГТД
(14.1.22-8)
ãäå α - коэффициент линейного расширения; Te - температура элемента.
Подставляя (14.1.22-5) в (14.1.22-6), получим соотношение для расчета напряжений в элементе по известным узловым перемещениям:
{σ} = [D][B]{δ}e – [D]{ε |
}) |
(14.1.22-9) |
0 |
|
|
Внешние силы, действующие на тело, можно разделить на две категории: массовые (или объемные) и поверхностные силы. Массовые силы характеризуются силой, приходящейся на единицу массы (или объема) тела. Пример массовых сил - центробежные силы. Поверхностные силы действуют на поверхности тела (см. Рис. 14.1.22_1), они обусловлены воздействием контактирующих тел или окружающей среды; пример поверхностных сил - давление жидкости или газа.
В узлах конечно-элементной сетки действуют три группы сил. Первая группа - силы, стати- чески эквивалентные внешним поверхностным и массовым силам {F}ep, они получаются интегрированием внешних сил по поверхности или объему и распределению их между соответствующими узлами. Вторая группа - силы, возникающие от на- чальной деформации {F}eε0.Третья группа – силы, пропорциональные узловым перемещениям {δ}e. Вектор узловых сил в элементе {F}e включает в себя по две силы в каждом узле:












 , (14.1.22-10)
, (14.1.22-10)
ãäå [K]e – матрица жесткости элемента
(14.1.22-10)
ãäå V – объем элемента.
Çíàê [ ]Ò означает транспортирование матрицы (строки и столбцы матрицы меняются местами).
Просуммировав узловые силы по всем элементам, получают систему алгебраических урав-
Рисунок 14.1.22_1 - Разбиение исследуемой области на конечные элементы
нений относительно неизвестных узловых перемещений {δ}:
[K] {δ} = {F}, |
(14.1.22-11) |
ãäå [K] - матрица жесткости системы;
{F} - вектор внешних нагрузок (включая тепловые).
Система (14.1.22-11) включат в себя N = zns линейных алгебраических уравнений. Здесь n – число узлов конечно-элементной сетки, z – число степеней свободы в каждом узле (в плоской задаче z = 2), s – число степеней свободы по которым перемещения известны (закрепленные узлы, например).
Решение системы (14.1.22-11) позволяет определить перемещения узловых точек {δ}, а по ним - деформации и напряжения в элементах рассчитываемой конструкции.
Соотношения метода конечных элементов для трехмерного напряженно-деформированного состояния аналогичны рассмотренным выше. Конеч- ные элементы в трехмерном случае представляют собой объемное тело (призмы, пирамиды), число степеней свободы в каждом узле – три.
14.1.23 - Реализация метода конеч- ных элементов в инженерных рас-
четах
Соотношения (14.1.22-1) - (14.1.22-6), определяющие свойства элементов, были записаны в простейшем виде. При проведении расчетов часто используют элементы с более сложными свойствами.
966

Глава 14 - Динамика и прочность ГТД
Возможно, в частности, использование вместо линейной аппроксимации перемещений в элементе (14.1.22-2) функции перемещений в виде полинома второго порядка. Такие элементы называются элементами второго порядка и имеют дополнительные узлы в серединах сторон. Их использование приводит к более сложным соотношениям, но позволяет при том же количестве элементов существенно повысить точность результатов.
Соотношения между напряжениями и деформациями, записанные в (14.1.22-6) в виде обобщенного закона Гука, также могут быть более сложными и учитывать анизотропию свойств материала, пластические деформации, ползучесть.
При моделировании трехмерного напряжен- но-деформированного состояния деталей авиационных двигателей используют объемные конечные элементы первого и второго порядка в виде 6-гран- ника (гексаэдра).
Элемент первого порядка определен восьмью узлами и имеет по три степени свободы в каждом узле, которые представляют собой поступательные перемещения в направлениях координатных осей x, y, и z. Для такого элемента возможно задание пластических свойств и ползучести. Элемент второго порядка также имеет форму шестигранника, но отличается большим количеством узлов – 20. В пакете ANSYS (см.ниже) наиболее широко использующийся элемент первого порядка имеет название SOLID45, второго порядка - SOLID95.
Построение конечноэлементной модели – один из наиболее ответственных этапов проведения расчетов методом конечных элементов, определяющий, наряду с принятыми граничными условиями, достоверность получаемых результатов.
Конечно-элементная модель характеризуется типом применяемых конечных элементов и густотой разбивки (размером элементов) в конкретных зонах. В одной модели могут быть применены разные типы элементов, выбор которых зависит от целей расчетного исследования, сложности геометрической модели, возможностей вычислительной техники и опыта исполнителя.
Густота разбивки конечноэлементной модели определяется одним общим правилом: в зонах ожидаемой концентрации напряжений сетка элементов должна сгущаться. Рекомендуемый характерный размер элемента в зоне концентрации должен быть примерно на порядок меньше типичного размера самого концентратора. Например, для описания конечноэлементной моделью галтели радиусом 2 мм необходимо применять элементы со стороной около 0,2 мм. Отметим, что применение конечных элементов второго порядка по-
зволяет получить приемлемую точность результатов относительно меньшим количеством элементов. При построении сеток следует избегать использования элементов с большим отношением размеров.
При моделировании тонкостенных деталей следует иметь в виду, что при их изгибе градиент напряжений по толщине может быть большим (растяжение на одной поверхности и сжатие на другой), следовательно, конечно-элементная сетка должна иметь несколько слоев элементов по толщине. В ряде случаев для таких конструкций рекомендуется использование специальных элементов в форме четырехугольного элемента криволинейной оболочки. В таких элементах используется специальная аппроксимация перемещений по толщине, позволяющая описывать деформацию изгиба в одном слое элементов.
Широкое применение метода конечных элементов в инженерных расчетах началось с появлением достаточно мощной вычислительной техники в начале 70-х годов. Уже тогда удавалось успешно моделировать напряженно-деформиро- ванное состояние и колебания ответственных деталей авиационных двигателей. К тому же времени относится развитие коммерческих программных продуктов, проводящих вычисления на основе метода конечных элементов.
В настоящее время существуют мощные программные комплексы, позволяющие решать не только задачи динамики и прочности конструкций, но и задачи гидродинамики, акустики, электромагнетизма, оптимизации и др. Наиболее известными являются: ANSYS (фирма-разработчик EDS, USA), NASTRAN (MSC Software, USA),ABAQUS (Hibbit, Karlsson&Sorensen Inc, USA), MARC (MSC Software, USA), I-DEAS (EDS, USA), Samcef (Samtech, Бельгия), LS–DYNA(EDS, USA). Эти программы близки по набору основных реализованных в них возможностей. Перечислим некоторые из них.
-Решение задач в одномерной, двумерной
èтрехмерной постановках. Наличие обширной библиотеки элементов различной формы с различ- ными функциями перемещений.
-Анализ статического и динамического напря- женно-деформированного состояния, модальный анализ, решение задач устойчивости конструкций, расчет стационарных и нестационарных тепловых полей, решение задач гидродинамики, электромагнитных полей и акустики.
-Реализация различных моделей поведения материалов: упругости, пластичности, ползучести с зависящими от температуры свойствами матери-
967
Глава 14 - Динамика и прочность ГТД
алов. Моделирование поведения конструкций из композиционных материалов.
-Решение задач оптимизации конструкций
ñдостаточно широкими возможностями выбора целевых функций и назначения ограничений.
-Специальные возможности для анализа нелинейных быстропротекающих процессов, таких как обрыв лопатки, или попадание птицы в авиадвигатель.
-Интерактивная работа с пользователем. Развитые средства построения геометрических и ко- нечно-элементных моделей, задания нагрузок, визуализации и обработки результатов расчетов.
-Наличие интерфейсов передачи геометрических моделей из систем автоматизированного проектирования и инженерных расчетов.
-Возможность дополнения пакета собственными элементами, критериями пластичности и разрушения и т.д., наличие языка макрокоманд, позволяющего пользователю разрабатывать собственные приложения.
Хотя список возможностей пакетов, в принципе, одинаков, есть и определенные отличия. В частности, в MARC изначально уделялось большое внимание моделированию технологических процессов штамповки, гибки и т.д. Пакет I-DEAS имеет специальные возможности обработки экспериментальных данных и идентификации результатов расчетов. В состав Samcef включен специальный модуль расчета динамики роторов. Видимо этими отличиями объясняется использование ведущими зарубежными фирмами сразу нескольких конечноэлементных пакетов. Например, на UTC используются ANSYS и NASTRAN; Snecma и MTU применяют NASTRAN, ABAQUS, Samcef; на Boeing - ANSYS, ABAQUS; Rolls-Royce использует ABAQUS и NASTRAN.
14.1.24 - Пример анализа напряженного состояния тела в трехмерной постановке методом конечных элементов. Концентрация напряжений в упругом и упруго-пластичес- ком теле
Результаты анализа напряженно-деформиро- ванного состояния методами теории упругости и п- ластичности в трехмерной (или двумерной) постановке ряде случаев существенно отличаются от результатов, получаемых в одномерной постановке методами сопротивления материалов. Причина
– в допущениях, принимаемых в рамках использу-
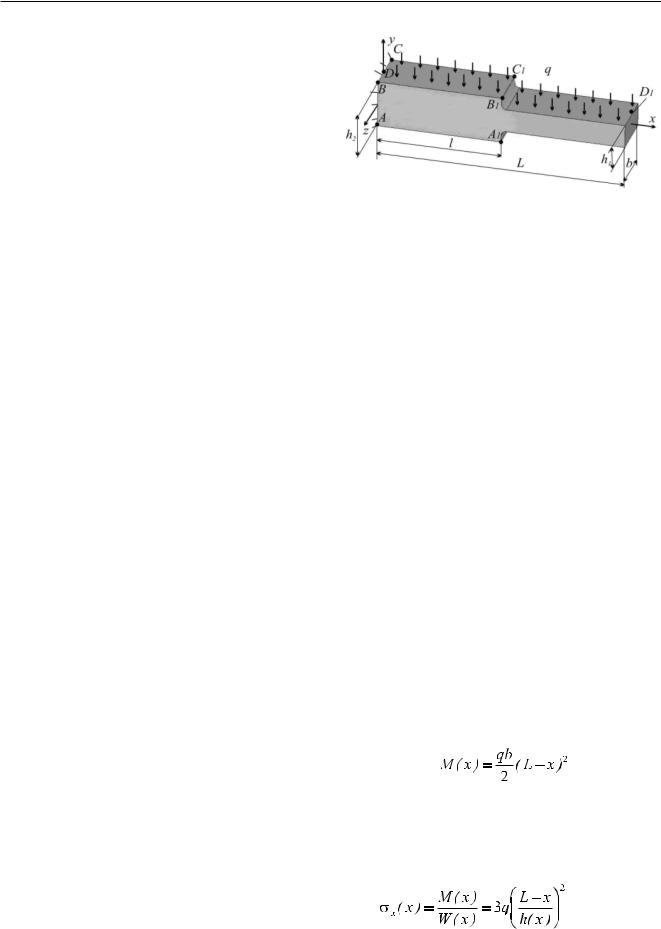
Рисунок 14.1.24_1 - Расчетная схема
емой в сопротивлении материалов стержневой модели. Напомним их: напряженное состояние счи- тается одноосным; отличной от нуля считается только одна компонента тензора напряжений – нормальное напряжение, направленное вдоль оси стержня; закон распределения этой компоненты по се- чению стержня считается линейным.
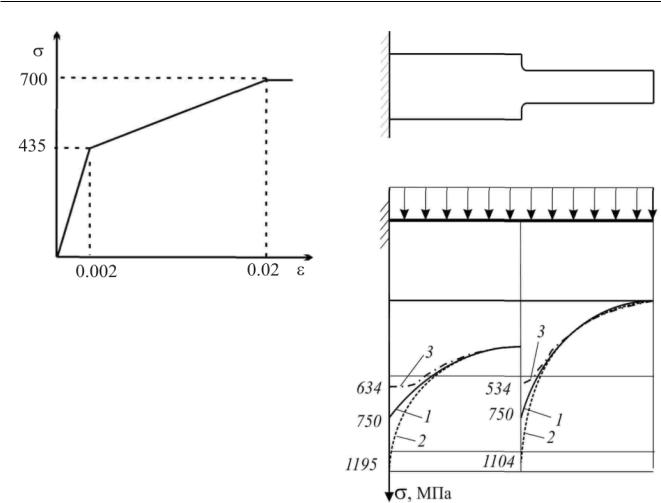
Рассмотрим в качестве примера задачу об изгибе консольного стержня равномерно распределенной нагрузкой q (см. Рис. 14.1.24_1). Стержень имеет ступенчатое сечение, в сечении A1B1C1 имеется галтель. Стержень жестко защемлен с левого конца, длина его тонкой части 50 мм, толстой – 50 мм. Размеры поперечного сечения в тонкой ча- сти: ширина b = 10 мм, высота h = 10 мм. В толстой части b = 10 мм, высота h = 20 мм. Радиус скругления в галтели 2 мм. На верхней поверхности приложена равномерно распределенная нагрузка интенсивностью q = 10 МПа, что при соответствует нагрузке на единицу длины (погонной) 105 Н/м. Материал стержня упруго-пластический, диаграмма σ-εприведена на Рис. 14.1.24_2. Модуль упругости E = 217500 МПа, предел текучести
σ0.2 = 430 ÌÏà.
Решение в рамках стержневой модели дает для изгибающего момента M :
Учитывая, что момент сопротивления прямоугольного сечения равен W = 1/6 bh2 , для напряжения на верхней поверхности σz получаем:
968
Глава 14 - Динамика и прочность ГТД
Рисунок 14.1.24_2 - Модель материала
Распределение этого напряжения по линии DD1 показано на Рис. 14.1.24_3 (кривая 1). Максимальное напряжение растяжения возникает в заделке и на линии B1C1, оно равно 750 МПа.
Анализ трехмерных полей напряжений и деформаций в стержне проводили с помощью метода конечных элементов. Конечно-элементная модель состояла из 9000 объемных двадцатиузловых элементов первого порядка и имела около 500 000 степеней свободы. Результаты расчета в виде полей компоненты напряжения σx и деформации εx приведены на Рис. 14.1.24_4.
На первом этапе анализ проводился без учета пластических деформаций, в упругой постановке. Расчеты показали, что напряженное состояние существенно отличается от полученного выше по стержневой модели лишь вблизи заделки и галтели (см. Рис. 14.1.24_4,а). Так, в частности, в галтели имеет место концентрация напряжений с теоретическим коэффициентом концентрации 1, 47, а в заделке – с коэффициентом 1,59. В заделке наиболее напряженными оказываются угловые точки на верхней поверхности, в этих точках напряженное состояние не одноосное, это всестороннее растяжение.
С измельчением сетки конечных элементов напряжения в концентраторах заделке возрастают. Так проявляется погрешность приближенного рас- чета методом конечных элементов, которая снижается с уменьшением размера элементов в зоне больших градиентов напряжений. Достаточно мелкой считают сетку, при которой напряжения перестают зависеть от размера элементов. В рассматриваемом примере в зоне галтели такая ситуация
Рисунок 14.1.24_3 - Напряжения в стержне
достигнута при параметрах сетки, указанных выше, т.е. приведенное значение коэффициента концентрации напряжений в галтели определено с достаточной для практических целей точностью. Иной оказывается ситуация в заделке. Неоднократное измельчение сетки в этой области не приводит к стабилизации напряжений. Это связано с особенностью напряженного состояния, которая состоит в том, что теоретически напряжения в жесткой заделке асимптотически стремятся к бесконечности при любой отличной от нуля нагрузке. С точки зрения практической прочности такой результат бесполезен, поскольку применение обычных критериев прочности невозможно.
Напряжения существенно превосходят предел текучести материала (см. Рис. 14.1.24_3), поэтому был проведен расчет с учетом пластических деформаций. Он показал следующее. Поле напряжений (см. Рис. 14.1.24_4б) отличается от упругого решения в локальной области вблизи концентраторов: галтели и заделки. Непосредственно вблизи концентраторов появились пластические зоны. За пре-
969
Глава 14 - Динамика и прочность ГТД
Рисунок 14.1.24_4 - Поля напряжений а) поле упругих напряжений; б) поле напряжений с учетом пластичности; в) зоны пластичности
делами пластической зоны напряжения несколько выше, чем в упругом решении, это эффект перераспределения напряжений. Напряжения оказались ниже, чем в расчете по стержневой модели, поэтому использовать коэффициент концентрации напряжений в качестве характеристики локального напряженного состояния нельзя.
Деформации в зонах концентрации напряжений стала существенно выше, чем в упругом решении. В зоне заделки суммарная деформация составила 0,0085, в том числе пластическая 0,0061. Этот эффект называется концентрацией деформаций. Зоны пластичности в стержне локализованы, поэтому перемещения мало отличаются от упругих.
Таким образом, трехмерная постановка зада- чи и метод конечных элементов позволяют детально исследовать напряженное состояние в зонах концентрации напряжений. Однако, если напряжения в этих зонах превышают предел текучести ма-
териала, в детали появляются пластические зоны, вблизи которых расчет напряжений в упругой постановке дает существенные погрешности. Именно локальные пластические деформации в зоне концентрации напряжений и деформаций при циклическом нагружении могут стать причиной разрушения деталей по механизму малоцикловой усталости.
970