

- •Содержание
- •Глава 1 - Общие сведения о газотурбинных двигателях
- •1.1 — Введение
- •1.2.1.2 — Турбовинтовые двигатели и вертолетные ГТД
- •1.2.1.3 — Двухконтурные турбореактивные двигатели (ТРДД)
- •1.2.1.4 — Двигатели для самолетов вертикального взлета и посадки
- •1.2.1.5 - Комбинированные двигатели для больших высот и скоростей полета
- •1.2.1.6 - Вспомогательные авиационные ГТД и СУ
- •1.2.2 - Авиационные СУ
- •1.2.3 - История развития авиационных ГТД
- •1.2.3.1 - Россия
- •1.2.3.2 - Германия
- •1.2.3.3 – Англия
- •1.3 - ГТД наземного и морского применения
- •1.3.1 - Области применения наземных и морских ГТД
- •1.3.1.1 -Механический привод промышленного оборудования
- •1.3.1.2 - Привод электрогенераторов
- •1.3.1.3 - Морское применение
- •1.3.2 - Основные типы наземных и морских ГТД
- •1.3.2.1 - Стационарные ГТД
- •1.3.2.2 - Наземные и морские ГТД, конвертированные из авиадвигателей
- •1.3.2.3 - Микротурбины
- •1.4 - Основные мировые производители ГТД
- •1.4.1 - Основные зарубежные производители ГТД
- •1.4.2 - Основные российские производители ГТД
- •1.6 - Перечень использованной литературы
- •Глава 2 - Основные параметры и требования к ГТД
- •2.1 - Основы рабочего процесса ГТД
- •2.1.1 - ГТД как тепловая машина
- •2.1.1.1 – Простой газотурбинный цикл
- •2.1.1.2 - Применение сложных циклов в ГТД
- •2.1.2 - Авиационный ГТД как движитель
- •2.1.3 - Полный к.п.д. и топливная эффективность (экономичность) ГТД
- •2.2 - Параметры ГТД
- •2.2.1 - Основные параметры авиационных ГТД
- •2.2.2 - Основные параметры наземных и морских приводных ГТД
- •2.3 - Требования к авиационным ГТД
- •2.3.1 - Требования к тяге (мощности)
- •2.3.2 – Требования к габаритным и массовым характеристикам
- •2.3.3 - Возможность развития ГТД по тяге (мощности)
- •2.3.4 - Требования к используемым горюче-смазочным материалам
- •2.3.4.1 - Топлива авиационных ГТД
- •2.3.4.2 – Авиационные масла
- •2.3.4.3 - Авиационные гидравлические жидкости
- •2.3.5 – Надежность авиационных ГТД
- •2.3.5.1 – Основные показатели
- •2.3.5.1.1 – Показатели безотказности, непосредственно влияющие на безопасность работы двигателя
- •2.3.5.2 – Методология обеспечения надежности
- •2.3.5.2.1 – Этап проектирования
- •2.3.6 - Ресурс авиационных ГТД
- •2.3.6.1 - Методология обеспечения ресурса
- •2.3.6.2 - Количественные показатели ресурса
- •2.3.7 - Требования производственной технологичности
- •2.3.8 - Требования эксплуатационной технологичности
- •2.3.8.1 - Эксплуатационная технологичность - показатель совершенства ГТД
- •2.3.8.2 - Основные качественные характеристики ЭТ
- •2.3.8.3 - Количественные показатели ЭТ
- •2.3.9 - Экономические требования к авиационным ГТД
- •2.3.9.1 - Себестоимость производства
- •2.3.9.2 - Стоимость ЖЦ двигателя
- •2.3.10 - Экологические требования
- •2.3.10.2 - Ограничения по шуму
- •2.3.12 - Соответствие требованиям летной годности
- •2.4 - Особенности требований к ГТД наземного применения
- •2.4.1 - Особенности требований к приводным ГТД для ГПА
- •2.4.1.1 - Требования к характеристикам ГТД
- •2.4.1.2 - Требования к ресурсам и надежности
- •2.4.1.4 - Используемые ГСМ
- •2.4.1.5 - Требования экологии и безопасности
- •2.4.1.6 - Требования производственной и эксплуатационной технологичности
- •2.4.2 - Особенности требований к ГТД энергетических установок
- •2.4.2.1 - Требования к характеристикам ГТД
- •2.4.2.2 - Используемые ГСМ
- •2.4.2.3 - Требования к ресурсам и надежности
- •2.4.2.4 - Требования к экологии и безопасности
- •2.4.2.5 - Требования к контролепригодности, ремонтопригодности и др.
- •2.5 - Методология проектирования
- •2.5.1 - Основные этапы проектирования ГТД
- •2.5.1.1 - Техническое задание
- •2.5.1.2 – Техническое предложение
- •2.5.1.3 – Эскизный проект
- •2.5.1.4 – Технический проект
- •2.5.1.5 – Разработка конструкторской документации
- •2.5.2 - Разработка конструкций ГТД на основе базовых газогенераторов
- •2.5.2.1 - Газогенератор – базовый узел ГТД
- •2.5.2.2 – Основные параметры и конструктивные схемы газогенераторов ГТД
- •2.5.2.3 – Создание ГТД различного назначения на базе единого газогенератора
- •2.6.1.1 — Общие положения по авиационным ГТД
- •2.6.1.2 — Общие положения по сертификации наземной техники
- •2.6.1.3 — Общие положения по сертификации производства и СМК
- •2.6.1.4 — Органы регулирования деятельности
- •2.6.1.4.1 — Авиационная техника
- •2.6.1.4.2 — Органы регулирования деятельности по сертификации производства и СМК
- •2.6.2.1 — Авиационная техника
- •2.6.2.2 — Наземная техника
- •2.6.2.3 Производство и СМК
- •2.6.2.4 — Принятые сокращения и обозначения
- •2.6.3.1 — Основные этапы создания авиационных ГТД
- •2.6.3.2 — Этапы процесса сертификации авиационных ГТД
- •Глава 3 - Конструктивные схемы ГТД
- •3.1 - Конструктивные схемы авиационных ГТД
- •3.1.1 - Турбореактивные двигатели
- •3.1.2 - Двухконтурные турбореактивные двигатели
- •3.1.3 - Турбовинтовые и вертолетные ГТД
- •3.2 - Конструктивные схемы наземных и морских ГТД
- •3.2.1 - Одновальные ГТД
- •3.2.2 - ГТД со свободной силовой турбиной
- •3.2.3 - ГТД со «связанным» КНД
- •3.2.4 - Конструктивные особенности наземных ГТД различного назначения
- •3.2.5 - Конструктивные особенности ГТД сложных циклов
- •3.4 - Перечень использованной литературы
- •Глава 4 - Силовые схемы ГТД
- •4.1 - Усилия, действующие в ГТД
- •4.1.2 - Крутящие моменты от газовых сил
- •Глава 5 - Компрессоры ГТД
- •6.4.4 - Корпуса КС
- •6.4.4.1 - Наружный корпус КС
- •6.4.4.2 - Внутренний корпус КС
- •6.4.4.3 - Разработка конструкции корпусов
- •6.4.5 - Системы зажигания ГТД
- •6.5 - Экспериментальная доводка КС
- •6.6 - Особенности КС двигателей наземного применения
- •6.7 - Перспективы развития камер сгорания ГТД
- •Глава 7 - Форсажные камеры
- •7.1 - Характеристики ФК
- •7.2 - Работа ФК
- •7.3 - Требования к ФК
- •7.4 - Схемы ФК
- •7.4.2 - Вихревые ФК
- •7.4.3 - ФК с аэродинамической стабилизацией
- •7.5 - Основные элементы ФК
- •7.5.1 - Смеситель
- •7.5.2 - Диффузоры
- •7.5.3 - Фронтовые устройства
- •7.5.4 - Корпусы и экраны
- •7.6 - Управление работой ФК
- •7.6.1 - Розжиг ФК
- •7.6.2 - Управление ФК на режимах приемистости и сброса
- •7.6.3 - Управление ФК на стационарных режимах
- •Глава 8 - Турбины ГТД
- •8.2 - Аэродинамическое проектирование турбины
- •8.2.2 - Технология одномерного проектирования турбины
- •8.2.4 - 2D/3D-моделирование невязкого потока в проточной части турбины
- •8.2.5 - 2D/3D-моделирование вязкого потока в турбине
- •8.2.6 - Синтез геометрии профилей и лопаточных венцов
- •8.2.7 - Одномерное проектирование турбины
- •8.2.7.1 - Выбор количества ступеней ТВД
- •8.2.7.2 - Выбор количества ступеней ТНД
- •8.2.7.3 - Аэродинамическое проектирование и к.п.д. турбины
- •8.2.9 - Методы управления пространственным потоком в турбине
- •8.2.10 - Экспериментальное обеспечение аэродинамического проектирования
- •8.2.11 - Перечень использованной литературы
- •8.3 - Охлаждение деталей турбины
- •8.3.1 - Тепловое состояние элементов турбин
- •8.3.1.1 - Принципы охлаждения
- •8.3.2 - Конвективное, пленочное и пористое охлаждение
- •8.3.3 - Гидравлический расчет систем охлаждения
- •8.3.4 - Методология расчета температур основных деталей турбин
- •8.3.5 - Расчет полей температур в лопатках
- •8.3.6 - Перечень использованной литературы
- •8.4 - Роторы турбин
- •8.4.1 - Конструкции роторов
- •8.4.1.1 - Диски турбин
- •8.4.1.2 - Роторы ТВД
- •8.4.1.3 - Роторы ТНД и СТ
- •8.4.1.4 - Примеры доводки и совершенствования роторов
- •8.4.1.5 - Предотвращение раскрутки и разрушения дисков
- •8.4.2 - Рабочие лопатки турбин
- •8.4.2.1 - Соединение рабочих лопаток с диском
- •8.4.3 - Охлаждение рабочих лопаток
- •8.4.4 - Перечень использованной литературы
- •8.5 - Статоры турбин
- •8.5.1 - Корпусы турбин
- •8.5.2 - Сопловые аппараты
- •8.5.3 - Аппараты закрутки
- •8.5.4 – Перечень использованной литературы
- •8.6 - Радиальные зазоры в турбинах
- •8.6.1 - Влияние радиального зазора на к.п.д. турбины
- •8.6.2 - Изменение радиальных зазоров турбины в работе
- •8.6.3 - Управление радиальными зазорами
- •8.6.4 - Выбор радиального зазора при проектировании
- •8.6.5 - Перечень использованной литературы
- •8.7 - Герметизация проточной части
- •8.7.1 - Герметизация ротора и статора от утечек охлаждающего воздуха
- •8.7.2 - Уплотнения между ротором и статором
- •8.7.3 - Перечень использованной литературы
- •8.8 - Материалы основных деталей турбины
- •8.8.1 - Диски и роторные детали турбины
- •8.8.2 - Сопловые и рабочие лопатки
- •8.8.3 - Покрытия лопаток
- •8.8.4 - Корпусы турбин
- •8.9.1 - Перечень использованной литературы
- •8.10.1 - Прогары и трещины лопаток ТВД
- •8.10.3 - Недостаточный циклический ресурс и поломки роторных деталей
- •8.10.4 - Устранение дефектов турбины в ходе доводки
- •8.11 - Перспективы развития конструкций и методов проектирования турбин
- •8.11.1 - 2D-аэродинамика: эффективные охлаждаемые лопатки ТВД
- •8.11.2 - 2D-аэродинамика: сокращение количества лопаток
- •8.11.3 - Противоположное вращение роторов ТВД и ТНД
- •8.11.4 - 2D-аэродинамика: эффективные решетки профилей ТНД
- •8.11.5 - 3D-аэродинамика: эффективные формы лопаточных венцов
- •8.11.6 - Новые материалы и покрытия для лопаток и дисков
- •8.11.7 - Совершенствование конструкций охлаждаемых лопаток
- •8.11.8 - Оптимизированные системы управления радиальными зазорами
- •8.11.9 - Развитие средств и методов проектирования
- •Глава 9 - Выходные устройства ГТД
- •9.1 - Нерегулируемые сопла
- •9.2 - Выходные устройства ТРДД
- •9.2.1 - Выходные устройства со смешением потоков
- •9.2.2 - Выходные устройства ТРДД с раздельным истечением потоков
- •9.3 - Регулируемые сопла
- •9.3.1 - Осесимметричные регулируемые сопла
- •9.3.1.1 - Регулируемое сопло двигателя Д30-Ф6
- •9.3.2 - Плоские сопла
- •9.4 - Выходные устройства двигателей самолетов укороченного и вертикального взлета-посадки
- •9.5 - «Малозаметные» выходные устройства
- •9.6 - Реверсивные устройства
- •9.6.1 - Реверсивные устройства ковшового типа
- •9.6.2 - Реверсивные устройства створчатого типа
- •9.6.3.1 - Гидравлический привод реверсивного устройства
- •9.6.3.3 - Механический замок фиксации положения реверсивного устройства
- •9.7 - Приводы выходных устройств
- •9.7.1 - Пневмопривод
- •9.7.2 - Пневмомеханический привод
- •9.8 - Выходные устройства диффузорного типа
- •9.8.1 - Конические диффузоры
- •9.8.2 - Осекольцевые диффузоры
- •9.8.3 - Улитки
- •9.8.4 - Соединения с выхлопными шахтами
- •9.8.5 - Выходные устройства вертолетных ГТД
- •9.12 - Перечень использованной литературы
- •Глава 10 - Привод агрегатов, редукторы, муфты ГТД
- •10.1 - Привод агрегатов ГТД
- •10.1.1 - Центральный привод
- •10.1.2 - Коробки приводов агрегатов
- •10.2 - Редукторы ГТД
- •10.2.1 - Редукторы ТВД
- •10.2.1.1 - Общие требования, кинематические схемы
- •10.2.1.2 - Конструкция редукторов ТВД
- •10.2.2 - Редукторы привода несущего и рулевого винтов вертолетов
- •10.2.2.1 - Редукторы привода несущего винта
- •10.2.2.1.1 - Кинематические схемы главных редукторов вертолетов
- •10.2.2.1.2 - Конструкция главных редукторов вертолетов
- •10.2.2.2 - Редукторы хвостовые и промежуточные
- •10.2.3 - Редукторы ГТУ
- •10.2.3.1 - Конструкция редукторов
- •10.3 - Муфты приводов ГТД и ГТУ
- •10.3.1 - Требования к муфтам
- •10.3.2 - Конструкция муфт
- •10.4 - Проектирование приводов агрегатов ГТД
- •10.4.1 - Проектирование центрального привода
- •10.4.1.1 - Конструкция центрального привода
- •10.4.2 - Проектирование коробок приводов агрегатов
- •10.4.2.1 - Конструкция коробки приводов агрегатов
- •10. 5 - Проектирование редукторов
- •10.5.1 - Особенности проектирования редукторов ТВД
- •10.5.2 - Особенности проектирования вертолетных редукторов
- •10.5.3 - Особенности проектирования редукторов ГТУ
- •10.6.1 - Требования к зубчатым передачам
- •10.6.2 - Классификация зубчатых передач
- •10.6.3 - Исходный производящий контур
- •10.6.4 - Нагруженность зубчатых передач
- •10.6.5 - Конструктивные параметры зубчатых передач
- •10.6.5.1 - Конструкции зубчатых колес
- •10.6.6 - Материалы зубчатых колес, способы упрочнения
- •Глава 11 - Пусковые устройства
- •11.1 - Общие сведения
- •11.1.1 - Основные типы пусковых устройств современных ГТД
- •11.1.2 - Технические характеристики пусковых устройств современных ГТД
- •11.2 - Электрические пусковые устройства ГТД
- •11.3 - Воздушные пусковые устройства ГТД
- •11.3.1 - Воздушно - турбинные пусковые устройства ГТД
- •11.3.2 - Регулирующие и отсечные воздушные заслонки
- •11.3.3 - Струйное пусковое устройство ГТД
- •11.4 - Турбокомпрессорные пусковые устройства ГТД
- •11.4.1 - Классификация ТКС ГТД
- •11.4.2 - Принцип действия ТКС
- •11.4.3 - Одновальный ТКС
- •11.4.4 - ТКС со свободной турбиной
- •11.4.5 - Особенности систем ТКС
- •11.5 - Гидравлические пусковые устройства ГТД
- •11.5.1 - Конструкция гидравлических стартеров
- •11.6 - Особенности пусковых устройств ГТД наземного применения
- •11.6.1 - Электрические пусковые устройства
- •11.6.2 - Газовые пусковые устройства
- •11.6.3 - Гидравлические пусковые устройства
- •11.7 - Редукторы пусковых устройств
- •11.8 - Муфты свободного хода пусковых устройств
- •11.8.1 - Муфты свободного хода роликового типа
- •11.8.2 – Муфты свободного хода храпового типа
- •11.9 – Системы смазки пусковых устройств
- •11.11 - Перечень используемой литературы
- •Глава 12 - Системы ГТД
- •12.1.1 - Системы автоматического управления и контроля авиационных ГТД
- •12.1.1.1 - Назначение САУ
- •12.1.1.2 - Состав САУ
- •12.1.1.3 - Основные характеристики САУ
- •12.1.1.5.2 - Порядок разработки САУ
- •12.1.1.5.3 - Основные принципы выбора варианта САУ в процессе проектирования
- •12.1.1.5.4 - Структурное построение САУ
- •12.1.1.5.5 - Программы управления ГТД
- •12.1.1.5.6 - Расчет и анализ показателей надежности
- •12.1.2 - САУ наземных ГТУ
- •12.1.2.1 - Назначение САУ
- •12.1.2.2 - Выбор САУ ГТУ и ее элементов
- •12.1.2.3 - Состав САУ ГТУ
- •12.1.2.4 - Основные характеристики САУ
- •12.1.2.5 - Работа САУ ГТУ
- •12.1.2.6 - Блок управления двигателем (БУД)
- •12.1.2.7 - Особенности системы контроля и диагностики наземных ГТД
- •12.1.4 – Перечень использованной литературы
- •12.2 - Топливные системы ГТД
- •12.2.1 - Топливные системы авиационных ГТД
- •12.2.1.1 - Назначение топливной системы
- •12.2.1.2 - Состав топливной системы
- •12.2.1.3 - Основные характеристики топливной системы
- •12.2.1.4 - Работа топливной системы
- •12.2.1.5 - Выбор топливной системы и ее элементов
- •12.2.1.5.1 – Выбор топливной системы
- •12.2.1.5.2 - Выбор насосов топливной системы
- •12.2.1.5.3 - Определение подогревов топлива в топливной системе
- •12.2.1.5.5 - Математическая модель топливной системы
- •12.2.1.6 - Гидроцилиндры
- •12.2.1.7 - Топливные фильтры
- •12.2.2 - Особенности топливных систем ГТУ
- •12.2.2.1 - Назначение топливной системы
- •12.2.2.2 - Выбор топливной системы и ее элементов
- •12.2.2.3 - Основные характеристики топливной системы
- •12.2.2.4 - Работа топливной системы
- •12.2.4 – Перечень использованной литературы
- •12.3 - Системы диагностики
- •12.3.1 - Общие вопросы диагностирования
- •12.3.1.1 - Задачи диагностирования ГТД
- •12.3.1.3 - Диагностируемые системы ГТД
- •12.3.1.4 - Виды наземного и бортового диагностирования ГТД
- •12.3.1.5 - Структура систем диагностики
- •12.3.1.6 - Регламент диагностирования ГТД
- •12.3.1.7 - Регистрация параметров ГТД
- •12.3.2 - Диагностирование системы механизации ГТД, САУ и ТП ГТД
- •12.3.3 - Диагностирование работы маслосистемы и состояния узлов ГТД, работающих в масле
- •12.3.3.1 - Неисправности маслосистемы и узлов ГТД, работающих в масле
- •12.3.3.2 - Диагностирование по параметрам маслосистемы
- •12.3.3.3 - Контроль содержания в масле частиц износа (трибодиагностика)
- •12.3.4 - Контроль и диагностика по параметрам вибрации ГТД
- •12.3.4.1 - Параметры вибрации и единицы изменения
- •12.3.4.2 - Статистические характеристики вибрации
- •12.3.4.3 - Причины возникновения вибрации в ГТД
- •12.3.4.4 - Датчики измерения вибрации
- •12.3.4.5 - Вибрационная диагностика ГТД
- •12.3.5 - Диагностирование ГТД по газодинамическим параметрам
- •12.3.5.1 - Неисправности проточной части ГТД
- •12.3.5.2 - Требования к перечню контролируемых параметров
- •12.3.5.3 - Алгоритмы диагностирования проточной части ГТД
- •12.3.6 - Обеспечение диагностирования ГТД инструментальными методами
- •12.3.6.1 - Виды неисправностей, выявляемых инструментальными методами
- •12.3.6.2 - Методы и аппаратура инструментальной диагностики
- •12.3.6.2.1 - Оптический осмотр проточной части ГТД
- •12.3.6.2.2 - Ультразвуковой метод диагностирования
- •12.3.6.2.3 - Вихретоковый метод диагностирования
- •12.3.6.2.4 - Капиллярный метод диагностирования с применением портативных аэрозольных наборов
- •12.3.6.2.5 - Диагностирование состояния проточной части ГТД перспективными методами
- •12.3.7 - Особенности диагностирования технического состояния ГТД наземного применения на базе авиационных двигателей
- •12.3.7.1 - Особенности режимов эксплуатации
- •12.3.7.2 - Общие особенности диагностирования наземных ГТД
- •12.3.7.3 - Особенности диагностирования маслосистемы
- •12.3.7.5 - Особенности диагностирования проточной части
- •12.4 - Пусковые системы
- •12.4.1 - Пусковые системы авиационных ГТД
- •12.4.1.1 - Назначение
- •12.4.1.2 - Общие требования
- •12.4.1.3 - Состав пусковых систем
- •12.4.1.4 - Область эксплуатации двигателя, область запуска
- •12.4.1.6 - Надежность запуска
- •12.4.1.7 - Характеристики запуска
- •12.4.1.8. - Выбор типа и параметров стартера
- •12.4.1.9 - Особенности запуска двигателей двухроторных схем
- •12.4.1.10 - Системы зажигания
- •12.4.1.11 - Обеспечение характеристик запуска на разгоне
- •12.4.1.12 - Регулирование компрессора на пусковых режимах
- •12.4.2 - Особенности пусковых систем наземных ГТУ
- •12.4.4 - Перечень использованной литературы
- •12.5 - Воздушные системы ГТД
- •12.5.1 - Функции ВС
- •12.5.2 - Основные требования к ВС
- •12.5.3 - Общие и локальные ВС ГТД
- •12.5.4 - Работа локальных ВС
- •12.5.4.1 - ВС охлаждения турбин ГТД
- •12.5.4.2 - ВС наддува и охлаждения опор
- •12.5.4.2.1 - Работа ВС наддува и охлаждения опор
- •12.5.4.2.2 - Типы ВС наддува и охлаждения опор
- •12.5.4.2.3 - Построение общей схемы ВС наддува и охлаждения опор
- •12.5.4.3 - Противообледенительная система (ПОС)
- •12.5.4.4 - Система кондиционирования воздуха
- •12.5.4.5 - Система активного управления зазорами
- •12.5.4.6 - Системы внешнего охлаждения ГТД
- •12.5.4.7 - Системы внешнего обогрева ГТД
- •12.5.5 - Подготовка воздуха для ВС ГТД
- •12.5.6 - Особенности ВС наземных ГТУ
- •12.5.7 - Агрегаты ВС
- •12.5.9 - Перечень использованной литературы
- •12.6.1 - Общие требования
- •12.6.2 - Схемы маслосистем ГТД
- •12.6.2.1 - Маслосистема с регулируемым давлением масла
- •12.6.2.2 - Маслосистема с нерегулируемым давлением масла
- •12.6.2.3 - Маслосистемы ГТД промышленного применения
- •12.6.3 - Маслосистемы редукторов
- •12.6.3.1 - Маслосистемы авиационных редукторов
- •12.6.3.2 - Маслосистемы редукторов ГТУ
- •12.6.4 - Особенности проектирование маслосистем
- •12.6.5 - Агрегаты маслосистемы
- •12.6.5.1 - Бак масляный
- •12.6.5.2 - Насосы масляные
- •12.6.5.3 - Теплообменники
- •12.6.5.4 - Фильтры и очистители
- •12.6.5.5 - Воздухоотделители и суфлеры
- •12.6.6 - Перспективы развития маслосистем
- •12.6.8 – Перечень использованной литературы
- •12.7 - Гидравлические системы ГТД
- •12.7.1 - Гидросистемы управления реверсивными устройствами
- •12.7.1.1 - Централизованная гидросистема управления реверсивным устройством
- •12.7.1.2 - Автономная гидросистема управления реверсивным устройством
- •12.7.1.3 - Порядок проектирования гидросистем
- •12.7.3 - Перечень использованной литературы
- •12.8 - Дренажные системы
- •12.8.1 - Назначение и классификация систем
- •12.8.2 - Характеристика объектов дренажа
- •12.8.3 - Основные схемы и принцип действия систем
- •12.8.4 - Основные требования к дренажным системам
- •12.8.5 - Обеспечение работоспособности дренажных систем
- •12.8.6 - Особенности конструкции дренажных баков
- •12.8.8 - Перечень использованной литературы
- •Глава 13 - Обвязка авиационных ГТД
- •13.1 - Общая характеристика обвязки
- •13.2 - Конструкция обвязки
- •13.2.1 - Трубопроводные коммуникации
- •13.2.1.1 - Основные сведения
- •13.2.1.2 - Трубы и патрубки
- •13.2.1.3 - Соединения
- •13.2.1.4 - Компенсирующие устройства
- •13.2.1.5 - Соединительная арматура
- •13.2.1.6 - Узлы крепления
- •13.2.1.7 - Неисправности трубопроводов
- •13.2.2 - Электрические коммуникации
- •13.2.2.1 - Общие сведения
- •13.2.2.2 - Конструкция элементов
- •13.2.2.2.1 - Электрические жгуты
- •13.2.2.2.2 - Электрические провода
- •13.2.2.2.3 - Электрические соединители
- •13.2.2.2.4 - Материалы для изготовления электрических жгутов
- •13.2.3 - Узлы крепления агрегатов и датчиков
- •13.2.4 - Механическая проводка управления
- •13.3 - Проектирование обвязки
- •13.3.1 - Требования к обвязке
- •13.3.2 - Основные принципы и порядок проектирования обвязки
- •13.3.3 - Методы отработки конструкции обвязки
- •13.3.3.1 - Натурное макетирование
- •13.3.3.2 - Электронное макетирование обвязки
- •13.3.5 - Проектирование трубопроводных коммуникаций
- •13.3.6 - Проектирование электрических коммуникаций
- •13.3.6.1 - Требования к электрическим коммуникациям
- •13.3.6.2 - Порядок проектирования электрических коммуникаций
- •13.3.6.3 - Разработка электрических схем
- •13.3.6.4 - Разработка монтажных схем
- •13.3.6.5 - Разработка чертежей электрических жгутов
- •13.6 - Перечень использованной литературы
- •Глава 14 - Динамика и прочность ГТД
- •14.1 - Теоретические основы динамики и прочности ГТД
- •14.1.1 - Напряженное состояние, тензор напряжений
- •14.1.2 - Уравнения равновесия
- •14.1.3 - Перемещения в деформируемом твердом теле. Тензор деформаций
- •14.1.4 - Уравнения совместности деформаций
- •14.1.5 - Обобщенный закон Гука
- •14.1.7 - Плоская задача теории упругости
- •14.1.8 - Пластическая деформация материала. Простое и сложное нагружение
- •14.1.11 - Ползучесть. Релаксация напряжений. Длительная прочность
- •14.1.12 - Усталостное разрушение элементов конструкций
- •14.1.13 - Малоцикловая усталость. Термическая усталость
- •14.1.14 - Накопление повреждений при нестационарном нагружении
- •14.1.15 - Закономерности развития трещин в элементах конструкций
- •14.1.16 - Свободные колебания системы с одной степенью свободы
- •14.1.17 - Вынужденные колебания системы с одной степенью свободы
- •14.1.18 - Колебания системы с вязким сопротивлением. Демпфирование колебаний
- •14.1.19 - Вынужденные колебания системы с одной степенью свободы под действием произвольной периодической возмущающей силы
- •14.1.21 - Колебания системы с распределенной массой
- •14.2 - Статическая прочность и циклическая долговечность лопаток
- •14.2.1 - Нагрузки, действующие на лопатки. Расчетные схемы лопаток
- •14.2.2 - Напряжения растяжения в профильной части рабочей лопатки от центробежных сил
- •14.2.3 - Изгибающие моменты и напряжения изгиба от газодинамических сил
- •14.2.5 - Суммарные напряжения растяжения и изгиба в профильной части лопатки
- •14.2.6 - Температурные напряжения в лопатках
- •14.2.7 - Особенности напряженного состояния широкохордных рабочих лопаток
- •14.2.9 - Расчет соединения рабочих лопаток с дисками
- •14.2.10 - Расчет на прочность антивибрационных (бандажных) полок и удлинительной ножки лопатки
- •14.2.11 - Особенности расчета на прочность лопаток статора
- •14.2.13 - Анализ трехмерных полей напряжений и деформаций в лопатках
- •14.3 - Статическая прочность и циклическая долговечность дисков
- •14.3.1 - Расчетные схемы дисков
- •14.3.2 - Расчет напряжений в диске в плоской оссесимметричной постановке
- •14.3.3 - Общие закономерности напряженного состояния дисков
- •14.3.7 - Подтверждение циклического ресурса дисков на основе концепции допустимых повреждений
- •14.3.8 - Расчет роторов барабанного типа
- •14.3.9 - Расчет дисков радиальных турбомашин
- •14.3.10 - Оптимальное проектирование дисков. Равнопрочный диск
- •14.4 - Колебания и вибрационная прочность лопаток осевых компрессоров и турбин
- •14.4.2 - Приближенный расчет собственных частот колебаний лопаток
- •14.4.3 - Трехмерные модели колебаний лопаток
- •14.4.4 - Влияние конструктивных и эксплуатационных факторов на собственные частоты колебаний лопатки
- •14.4.6 - Автоколебания лопаток
- •14.4.7 - Демпфирование колебаний лопаток
- •14.4.8 - Вынужденные колебания лопаток. Резонансная диаграмма
- •14.4.9 - Математическое моделирование вынужденных колебаний лопаток
- •14.4.10 - Экспериментальное исследование колебаний лопаток
- •14.4.11 - Коэффициент запаса вибрационной прочности лопаток, пути его повышения
- •14.4.12 - Колебания дисков
- •14.5 - Динамика роторов. Вибрация ГТД
- •14.5.1 - Критическая частота вращения ротора. История вопроса
- •14.5.2 - Динамика одномассового ротора. Поступательные перемещения
- •14.5.3 - Динамика одномассового ротора. Угловые перемещения
- •14.5.4 - Динамика одномассового несимметричного ротора
- •14.5.5 - Ротор с распределенными параметрами
- •14.5.6 - Особенности колебаний системы роторов и корпусов
- •14.5.7 - Демпфирование колебаний роторов
- •14.5.7.1 - Конструкция и принцип действия демпферов колебаний роторов
- •14.5.7.2 - Расчет параметров демпфирования
- •14.5.7.3 - Особенности гидромеханики реальных демпферов
- •14.5.8 - Вибрация ГТД
- •14.5.8.1 - Источники возмущающих сил и спектр вибрации
- •14.5.8.3 - Статистические характеристики вибрации
- •14.5.8.4 - Измерение и нормирование вибрации
- •14.6 - Прочность корпусов и подвески двигателя
- •14.6.1 - Силовая схема корпуса. Условия работы силовых корпусов
- •14.6.4 - Устойчивость корпусных деталей
- •14.6.5 - Расчет корпусов на непробиваемость
- •14.6.6 - Расчет элементов подвески
- •14.8 – Перечень использованной литературы
- •Глава 15 - Шум ГТД
- •15.1 - Источники шума ГТД
- •15.3 - Методы оценки акустических характеристик
- •15.4 - Снижение шума ГТД
- •15.4.1 - Методология проектирования систем шумоглушения
- •15.4.2 - Шумоглушение в выходных устройствах авиационных ГТД
- •15.4.3 - Конструкция звукопоглощающих узлов авиационных ГТД
- •15.4.4 – Глушители шума в наземных ГТУ
- •15.4.5 – Конструкция глушителей шума наземных ГТД
- •15.7 – Список использованной литературы
- •Глава 16 - Газотурбинные двигатели как силовой привод
- •16.1 - ГТД в силовом приводе ГТЭС и ГПА
- •16.2 - ГТД в силовых (энергетических) установках кораблей и судов
- •16.3 - ГТД в силовых установках танков
- •16.5 - Компоновка корабельных и судовых ГГТД
- •16.6 - Компоновка ГТД в силовой установке танка
- •16.8 – Перечень использованной литературы
- •Глава 17 - Автоматизация проектирования и поддержки жизненного цикла ГТД
- •17.1 - Проектирование и информационная поддержка жизненного цикла ГТД (идеология CALS)
- •17.2 - Жизненный цикл изделия. Обзор методов проектирования
- •17.3 - Программные средства проектирования
- •17.4 - Аппаратные средства систем проектирования
- •17.5 - PDM-системы: роль и место в организации проектирования
- •17.6 - Организация производства и ERP-системы
- •17.7 - Параллельный инжиниринг. Интеграция эскизного и технического проектирования
- •17.8 - Переход на безбумажную технологию
- •17.10 - ИПИ-технологии и эксплуатация изделий
- •17.11 - ИПИ-технологии и управление качеством
- •17.12 - Анализ и реинжиниринг бизнес-процессов
- •17.13 - Основы трехмерного проектирования
- •17.13.1 - Общие принципы трехмерного проектирования
- •17.13.1.1 - Способы создания геометрических моделей
- •17.13.1.2 - Основные термины объемной геометрической модели
- •17.13.1.3 - Принцип базового тела
- •17.13.1.4 - Основные термины при проектировании геометрической модели детали
- •17.13.2 - Управляющие структуры
- •17.13.3 - Принцип «Мастер-модели»
- •17.13.5 - Моделирование сборок
- •17.15 - Перечень использованной литературы
- •Глава 18 - Уплотнения в ГТД
- •18.1 - Уплотнение неподвижных соединений
- •18.2 - Уплотнения подвижных соединений
- •18.2.1 - Гидравлический расчет уплотнений подвижных соединений
- •18.3 - Уплотнение газового тракта между ротором и статором ГТД
- •18.3.1 - Лабиринтные уплотнения
- •18.3.2 - Щеточные уплотнения
- •18.3.3 - Скользящие сухие уплотнения газодинамические
- •18.3.4 - Скользящие сухие уплотнения газостатические
- •18.3.5 - Сравнение эффективностей уплотнений газового тракта между ротором и статором ГТД
- •18.4 - Примеры уплотнений газового тракта ГТД
- •18.4.1 - Пример 1
- •18.4.2 - Пример 2. Уплотнение статорной и роторной частей турбины
- •18.5 - Уплотнения масляных полостей опор роторов, редукторов, коробок приводов
- •18.7 - Перечень использованной литературы

Глава 9 - Выходные устройства ГТД
Рисунок 9.3.1.1_10 - Регулируемая часть сопла 1-ферма; 2-звено створок; 3-демпфер; 4-звено проставок; 5-привод; 6- гидроуправление
низкой удельной массой. На подвижные детали для |
повысить боевую эффективность самолетов сформу- |
|
повышения износостойкости наносится методом |
лировали основные принципы ее осуществления: 1 |
|
плазменного напыления твердое покрытие на ос- |
– повышение маневренности как на дозвуковых, так |
|
нове карбидов вольфрама и твердая смазка на ос- |
и сверхзвуковых скоростях и 2 – снижение радиоло- |
|
нове графита. Детали проточной части: створки, |
кационной и инфракрасной заметности. Реализация |
|
проставки первого, второго и третьего рядов про- |
второй части этих принципов для самолетов в США |
|
ходят при изготовлении операцию термофиксации, |
проходила в рамках программы «Stealth». В значи- |
|
что уменьшает коробления в работе при высокой |
тельной степени и тот и другой принципы, как по- |
|
температуре и способствует сохранению герметич- |
казали исследования, достаточно просто могли |
|
ности. |
быть реализованы в конструкции ВУ: повышение |
|
|
маневренности – управлением вектора тяги (УВТ), |
|
9.3.2 - Плоские сопла |
включая применение реверсивного устройства |
|
(РУ), а снижение заметности – заменой круглого |
||
|
||
Примерно в середине семидесятых годов про- |
выходного сечения прямоугольным с соотношени- |
|
шлого века авиационные конструкторы в стремлении |
ем высоты к ширине 1:2…1:3 и более, исключени- |
556

Глава 9 - Выходные устройства ГТД
Рисунок 9.3.1.1_11 – Балки с механизмом синхронизации 1 – кронштейны; 2 – балки; 3 и 4 – шарниры; 5 – сфера; 6 и 7 - проушины
557

Глава 9 - Выходные устройства ГТД
Рисунок 9.3.1.1_12 – Флюгерная часть сопла 1 - створка третьего ряда; 2 - кронштейн; 3 - подвеска; 4 - наружная створка;
5 - створка четв¸ртого ряда; 6 - наружная проставка; 7 - проставка третьего ряда
ем прямой видимости наиболее нагретых частей |
3 для изменения площади критического сечения и по |
|
двигателя (лопаток турбины) и снижением темпе- |
||
два гидроцилиндра 4 – для привода сверхзвуковых |
||
ратуры выхлопа. Такие ВУ получили название |
||
створок 5. Верхняя и нижняя створки дозвуковой |
||
«плоских сопел». Появилось множество схем, одна |
||
части сопла синхронизируются двумя симметрич- |
||
из которых приведена на Рис. 9.3.2_1. |
||
ными рычагами 6 и приводятся двумя гидроцилин- |
||
Конструктивно узел состоит из неподвижной |
||
драми, по одному с каждой стороны. Сопло позво- |
||
рамы 1, к которой крепятся все остальные подвиж- |
||
ляет осуществлять отклонение вектора тяги на угол |
||
ные и неподвижные элементы. Механизм управле- |
||
±20° при угловой скорости 30 град/сек. |
||
ния створками состоит из рычажного устройства |
||
|
||
и гидравлических приводов. На обеих боковых стен- |
|
|
ках 2 сопла установлено по одному гидроцилиндру |
|
558
Глава 9 - Выходные устройства ГТД
Рисунок 9.3.2_1 – Схема плоского сопла с УВТ и РУ 1 – рама; 2 – стенка; 3– гидроцилиндр управления створками дозвуковой части сопла и
РУ;4 – гидроцилиндр управления створками сверхзвуковой части сопла; 5 – створка сверхзвуковая; 6 – рычаг; 7 – створка дозвуковая; 8 – «щелевые» каналы РУ
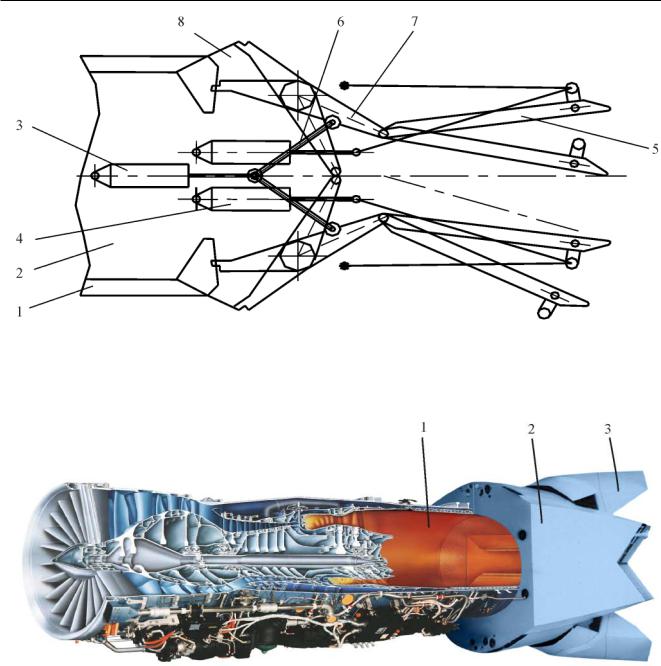
Рисунок 9.3.2_2 – Двигатель F119-PW-100
1 – переходный участок; 2 – стенка; 3 – створка
Изменение площади критического сечения |
Скорость отклонения вектора тяги на полном |
осуществляется поворотом дозвуковых створок 7. |
форсированном режиме вверх и вниз – до 20 град/сек. |
Реверсирование тяги обеспечивается дальнейшим |
Створки сопла могут занимать согласованное с дру- |
вращением створок дозвуковой части сопла, кото- |
гими кромками самолета положение с целью |
рые открывают «щелевые» каналы 8 для реверси- |
уменьшения радиолокационной заметности и фор- |
руемого потока газов и закрывают критическое |
мируют выхлоп таким образом, чтобы уменьшить |
сечение сопла. Изменение направления вектора |
его температуру. |
тяги осуществляется асимметричным отклонени- |
Плоские сопла установлены также на двига- |
ем сверхзвуковых створок. |
телях General Electric F404-GE-F102 (тактический |
По подобной схеме фирмой Pratt&Whitney |
ударный самолет F117A), F118-GE-100 (бомбарди- |
было создано ВУ для двигателя F100 самолета F15, |
ровщик В-2). |
а в дальнейшем - для двигателя F119-PW-100 (см. |
В СССР также проводились эксперименталь- |
Рис. 9.3.2._2, 9.3.2_3) самолета F22. |
но-исследовательские и опытные работы по плос- |
559
Глава 9 - Выходные устройства ГТД
Рисунок 9.3.2_3 – ВУ двигателя F119-PW-100
ким соплам. Экспериментальное плоское сопло |
Летающая лаборатория выполнила «… 20 по- |
было изготовлено в уфимском НПО «Мотор». Сопло |
летов, в ходе которых были получены данные по |
прошло стендовые испытания и было установлено |
значительному (в несколько раз) снижению ИК-за- |
на левый двигатель АЛ-31Ф самолета СУ-27УБ, пе- |
метности двигателя с плоским соплом» [9.12.9]. |
ределанного в летающую лабораторию Т10-26 (см. |
Однако развитие средств поражения сегодня опе- |
Рис. 9.3.2_4). Хорошо видна разница с установлен- |
режает возможности «самолетчиков» и «двигате- |
ным на правом двигателе серийным осесимметрич- |
листов» в дальнейшем уменьшении заметности |
ным соплом. |
и вряд ли это состояние изменится. |
560

Глава 9 - Выходные устройства ГТД
Рисунок 9.3.2_4 – Плоское сопло двигателя АЛ-31Ф на летающей лаборатории Т10-26
Кроме того, обеспечение необходимой проч- |
- механическим способом, когда отклоняется |
ности и жесткости конструкции плоского сопла |
непосредственно сопло или его часть. |
неизбежно сопровождается увеличением массы ВУ. |
В настоящее время наибольшее распростра- |
Так двигатель F100 (P&W) с плоским соплом име- |
нение получил механический способ отклонения |
ет массу на 180 кг больше, чем с осесимметрич- |
вектора тяги. Отклонение вектора тяги осуществ- |
ным. Эта проблема частично может быть решена |
ляется либо с помощью поворота всего осесиммет- |
применением композитных материалов типа «уг- |
ричного сопла на шарнирной подвеске или только |
лерод – углерод», но проблема пререходного учас- |
его сверхзвуковой части. |
тка от круглого сечения за турбиной (никто еще не |
К системам УВТ предъявляются следующие |
сделал квадратной турбины!) к прямоугольному на |
основные требования: |
входе в сопло остается… Так при испытании со- |
- система УВТ должна функционировать на |
пла НПО «Мотор» потери тяги в плоском сопле за |
всех режимах работы двигателя; |
счет трансформации потока достигли 14…17% |
- площадь критического сечения сопла регу- |
…[9.12.9]. Остается управление вектором тяги |
лируется независимо от системы УВТ и не долж- |
(УВТ). Но и это достоинство плоских сопел «пе- |
на меняться при изменении вектора тяги; |
рехвачено» и реализовано с осесимметричными со- |
- частота отклонения вектора тяги может со- |
плами (и иногда даже с большей эффективностью). |
ставлять до 50 движений в минуту при маневрах |
|
самолета в вертикальной и до 25 – при маневрах |
9.3.3 - Осесимметричные сопла |
в горизонтальной плоскостях; |
с управляемым вектором тяги |
- скорость изменения углов – до 30 град/с, по- |
Управление вектором тяги может произво- |
грешность установки угла ~ ± 0,1°; |
- давление газа за турбиной и расход газа че- |
|
диться разными способами: |
рез сопло на режиме УВТ должны быть такими же, |
- пневматическим способом, с использовани- |
как при прямом выходе потока и с той же степе- |
ем эффекта Коанда; |
нью понижения давления в сопле πñ*; |
- при помощи дефлекторов, установленных |
- при отказе системы УВТ сопло должно авто- |
в районе выходного сечения сопла; |
матически устанавливаться в положение прямой тяги. |
561

Глава 9 - Выходные устройства ГТД
9.3.3.1 - Осесимметричное сопло |
Поворотный узел состоит из неподвижного 1 |
|
с поворотным узлом |
и подвижного 2 корпусов с экранами. Неподвиж- |
|
ный корпус шарнирно связан в горизонтальной |
||
Наиболее понятной с точки зрения конструк- |
||
плоскости с подвижным корпусом при помощи |
||
ции системы УВТ является схема изменения векто- |
двух осей 3, закрепленных в неподвижном корпу- |
|
ра тяги с помощью поворотного узла, размещенно- |
се. На подвижном корпусе закреплено сферичес- |
|
го между форсажной камерой и соплом. При этом |
кое кольцо 4, по которому осуществляется стыков- |
|
поворот потока осуществляется в его дозвуковой |
ка с мотогондолой. |
|
части сопла. Такая конструкция позволяет модер- |
К переднему фланцу подвижного корпуса |
|
низировать существующие конструкции РС введе- |
крепится уплотнительное кольцо 5 с подвижны- |
|
нием поворотного узла. Примером такого сопла яв- |
ми в радиальном направлении графитовыми вкла- |
|
ляется ВУ двигателя АЛ-31ФП (НПО «Сатурн»). |
дышами. Уплотнительное кольцо герметизирует |
|
Осесимметричное сопло с поворотным уз- |
тракт охлаждения поворотного узла. К заднему |
|
лом позволяет обеспечить отклонение вектора |
фланцу подвижного корпуса крепится корпус 6 РС. |
|
тяги в одной плоскости (см. Рис. 9.3.3.1_1). Оно |
Гидроцилиндры 7 управления вектором тяги шар- |
|
состоит из двух модулей: поворотного узла и ре- |
нирно закреплены на неподвижном корпусе, а што- |
|
активного сопла. Поворотный узел позволяет из- |
ки гидроцилиндров – на кронштейнах подвижно- |
|
менить направление вектора тяги на различных |
го корпуса. Верхние и нижние гидроцилиндры |
|
режимах работы двигателя. Поворот осуществ- |
работают в противофазе и управляются агрегатом |
|
ляется на угол ±15 градусов в одной плоскости. |
управления вектором тяги. |
|
Реактивное сопло – осесимметричное, сверхзву- |
Осесимметричное сопло состоит из корпуса |
|
ковое, всережимное, с непрерывным контуром. |
и привода створок. На корпусе 6 шарнирно зак- |
|
Схема осесимметричного сопла с поворотным |
реплены дозвуковые створки 8. Сверхзвуковые |
|
узлом представлена на Рис. 9.3.3.1_2. |
створки 9 шарнирно закреплены на концах дозву- |
Рисунок 9.3.3.1_1 - Осесимметричное сопло с поворотным узлом (НПО «Сатурн»)
562

Глава 9 - Выходные устройства ГТД
ковых створок. Наружные створки 10 шарнирно закреплены на кронштейнах корпуса сопла, а их концы через ролики подвижно закреплены в направляющих 11 сверхзвуковых створок на выходе сопла. Механизм коррекции площади выходного сечения выполнен в виде «браслета» из пневмоцилиндров 12.
Дозвуковые створки и проставки образуют критическое сечение сопла. Управление створками осуществляется гидроцилиндрами 13. Изменение площади критического сечения происходит за счет возвратно-поступательного движения штоков гидроцилиндров, обеспечивающих поворот створок через систему рычагов и тяг относительно заднего фланца корпуса сопла.
9.3.3.2 - Осесимметричные сопла
ñуправляемым вектором тяги
âсверхзвуковой части
Отклонение вектора тяги также может быть осуществлено поворотом потока в сверхзвуковой части сопла за критическим сечением.
Для этого в осесимметричном сопле (см. Рис. 9.3.3.2_1) поворотный узел размещается между венцами створок первого и второго рядов. Управление поворотом сверхзвуковой части сопла позволяет обеспечить меньшее усилие управляющей системы, чем при отклонении потока в дозвуковой части (осесимметричное сопло с поворотным узлом).
Однако, потери тяги, связанные с поворотом потока, могут значительно возрасти по сравнению с потерями отклоненного осесимметричного сопла.
Рисунок 9.3.3.1_2 – Осесимметричное сопло с поворотным узлом 1 – неподвижный корпус; 2 – подвижный корпус; 3 – оси; 4 – сферическое кольцо; 5 – уп-
лотнительное кольцо; 6 – корпус РС; 7 – гидроцилиндры управления вектором тяги; 8 – дозвуковые створки; 9 – сверхзвуковые створки; 10 – наружные створки; 11 – направляющие сверхзвуковых створок; 12 – пневмоцилиндры «управления» Fâûõ; 13 – гидроцилиндры управления Fêð
563

Глава 9 - Выходные устройства ГТД
Рисунок 9.3.3.2_1 – Схема регулируемого сопла с отклонением сверхзвуковой части (General Electric Company)
Рисунок 9.3.3.2_2 – Сопло «КЛИВТ» (ГУНПП «Завод имени В.Я. Климова»)
1 – сверхзвуковые створки; 2 – наружные створки; 3 – обтекатели привода управления вектором тяги
564

Глава 9 - Выходные устройства ГТД
Рисунок 9.3.3.2_3 – Схема сопла «КЛИВТ»
1 – дозвуковые створки; 2 – гидроцилиндры регулирования Fêð; 3 – управляющее кольцо; 4 – гидроцилиндры управления вектором тяги; 5 – сверхзвуковые створки; 6 – тяги привода сверхзвуковой части
В рассматриваемой схеме (см. Рис. 9.3.3.2_1) поворот потока осуществляется после критического сечения сопла воздействием на сверхзвуковые створки. Сопло обеспечивает всеракурсное отклонение вектора тяги (360°). Управление дозвуковыми створками производится с помощью приводов 1, которые перемещают установочное кольцо 2 вдоль оси сопла. Ролики 3 на кольце перемещаются по профилированной поверхности створок 4 и изменяют их угол наклона, а следовательно, и п- лощадь критического сечения. Поворот сверхзвуковых створок 5 и поворот потока осуществляются за счет изменения угла наклона a кольца 6 управления сверхзвуковыми створками. Угол наклона кольца меняется за счет установки различ- ной длины гидроцилиндров привода 7.
Другим примером сопла с УВТ за счет поворота сверхзвуковой части является сопло «КЛИВТ».
Сопло с УВТ (см. Рис. 9.3.3.2_2) разработано на базе серийного регулируемого сопла двигателя РД-33 (ТМКБ «Союз»).
Схема (см. Рис. 9.3.3.2_3) осесимметричного РС с поворотом сверхзвуковой части обеспечивает как и сопло GE всеракурсное (360°) отклонение вектора тяги.
Площадь критического сечения регулируется изменением угла наклона дозвуковых створок 1 относительно оси сопла с помощью двенадцати гидроцилиндров 2, объединенных в гирлянду типа «браслет», охватывающую сопло в районе крити- ческого сечения.
565